Подключаем джойстик
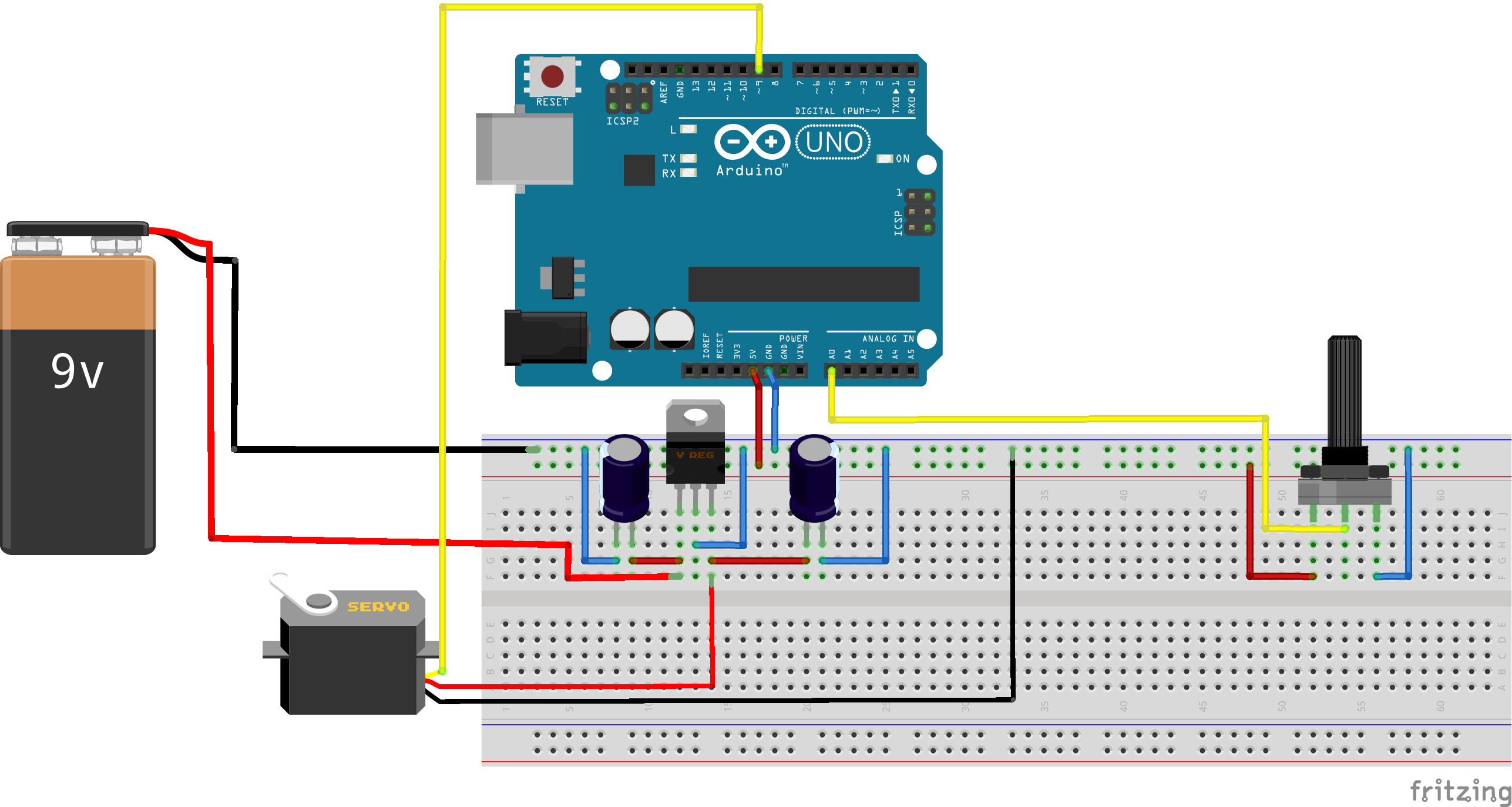
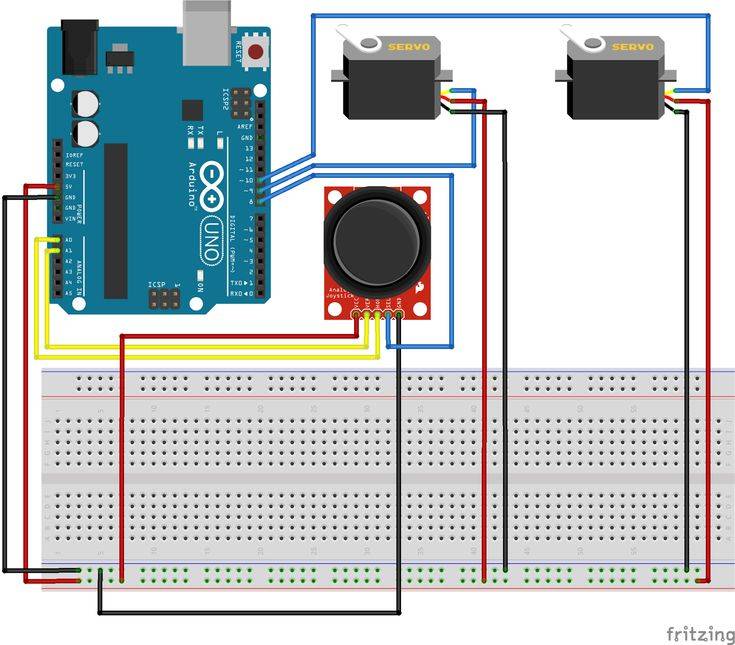
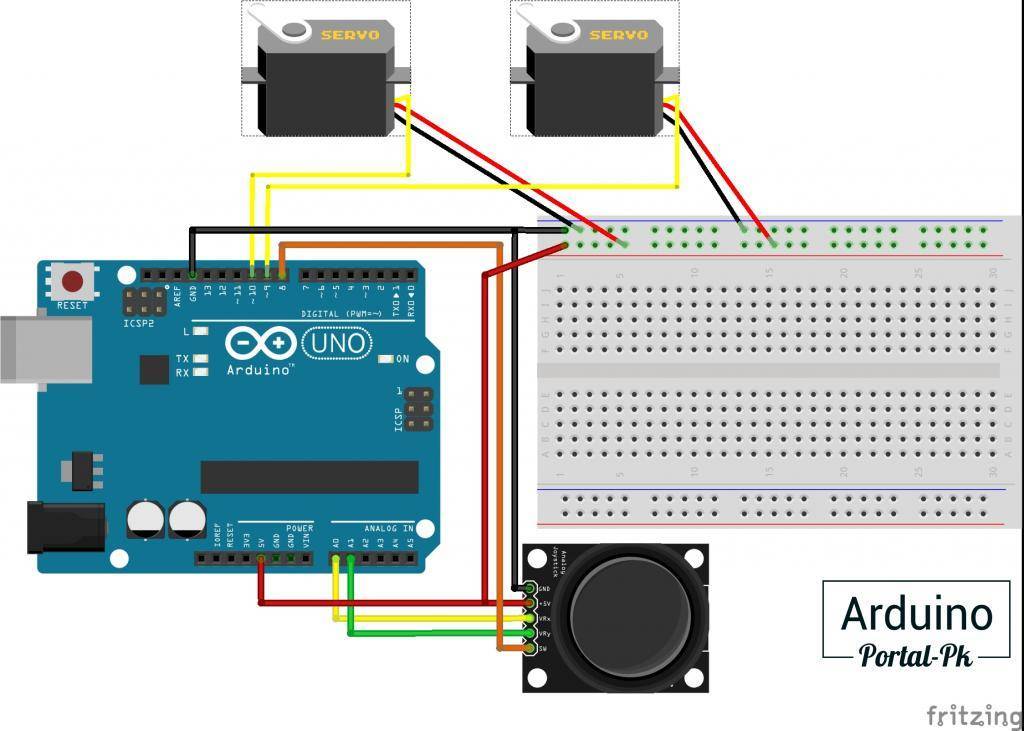
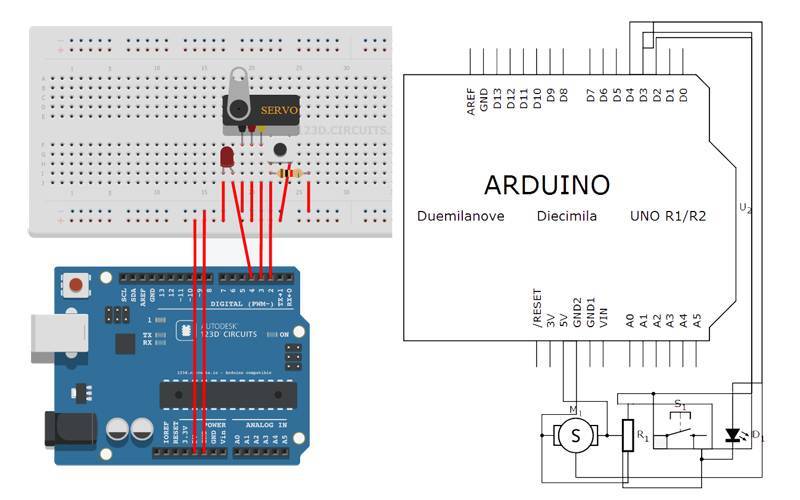
Представленная на рисунке ниже схема подключения может вас немного смутить. Но поверьте, все не так сложно как кажется на первый взгляд. Опять таки для подключения используем монтажную плату.
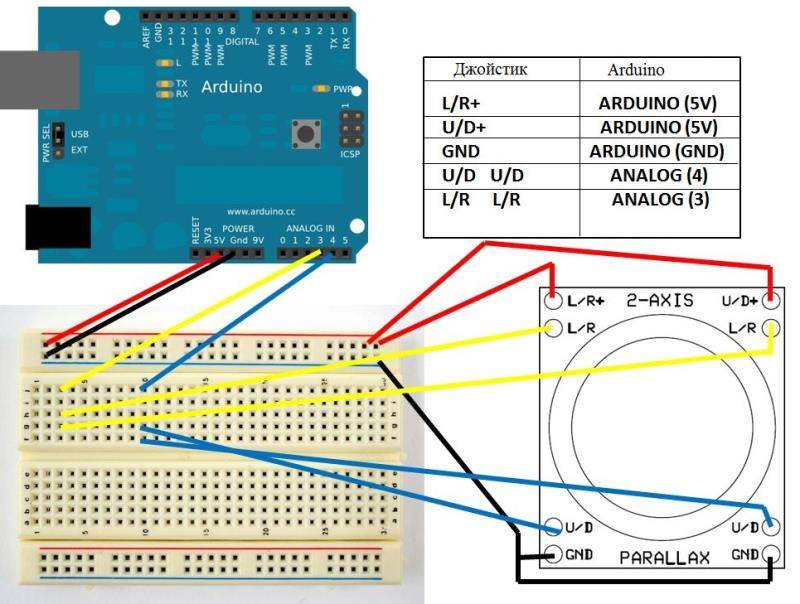
1. На модуле джойстика один выход U/R+ и один L/R+. Это выходы для подключения питания. Эти выходы подключаются к пину 5V на Arduino.
2. Также есть два разъема L/R и два разъема U/D. Они подключаются к аналоговым входам А3 и А4.
3. Земля на джойстике подключается к земле на Arduino.
Не забудьте перепроверить подключение. Помните, что большинство ошибок в проектах возникает именно из-за неправильного подключения. Особенно если вы используете монтажную плату, которая обрастает кучей коннекторов.
Описание [ править | править код ]
Сервоприводом является любой тип механического привода (устройства, рабочего органа), имеющий в составе датчик (положения, скорости, усилия и т. п.) и блок управления приводом (электронную схему или механическую систему тяг), автоматически поддерживающий необходимые параметры на датчике (и, соответственно, на устройстве) согласно заданному внешнему значению (положению ручки управления или численному значению от других систем).
Проще говоря, сервопривод является «автоматическим точным исполнителем» — получая на вход значение управляющего параметра (в режиме реального времени), он «своими силами» (основываясь на показаниях датчика) стремится создать и поддерживать это значение на выходе исполнительного элемента.
К сервоприводам, как к категории приводов, относится множество различных регуляторов и усилителей с отрицательной обратной связью, например, гидро-, электро-, пневмоусилители ручного привода управляющих элементов (в частности, рулевое управление и тормозная система на тракторах и автомобилях), однако термин «сервопривод» чаще всего (и в данной статье) используется для обозначения электрического привода с обратной связью по положению, применяемого в автоматических системах для привода управляющих элементов и рабочих органов.
Сервоприводы в настоящее время применяются в высокопроизводительном оборудовании следующих отраслей: машиностроение; автоматические линии производства: напитков, упаковки, стройматериалов, электроники и т. д., подъемно-транспортная техника; полиграфия; деревообработка, пищевая промышленность. [ источник не указан 817 дней ]
Как работает клешня «хватайки»
Как конкретно работает клешня, в профессиональном аппарате, я не разглядел, поскольку механика была прикрыта защитным кожухом, поэтому пришлось поэкспериментировать.
Поломав некоторое время голову, получилось придумать более-менее рабочий вариант: клешня состоит из четырех «пальцев», которые одним концом фиксируются на неподвижной раме. Так же добавил крестовину, с ней «пальцы» имеют шарнирное соединение примерно посередине. К неподвижной части рамы жестко зафиксировал сервопривод, качалка которого опускает и поднимает ось. Крестовина в свою очередь жестко закреплена к оси и вместе с ней совершает движения вверх и вниз, из-за чего и происходит сжатие и раскрытие клешни. Чтобы было понятнее, ниже находится картинка с клешней. Изображение можно вращать с помощью мышки, зажав ЛКМ и перемещая влево или вправо.
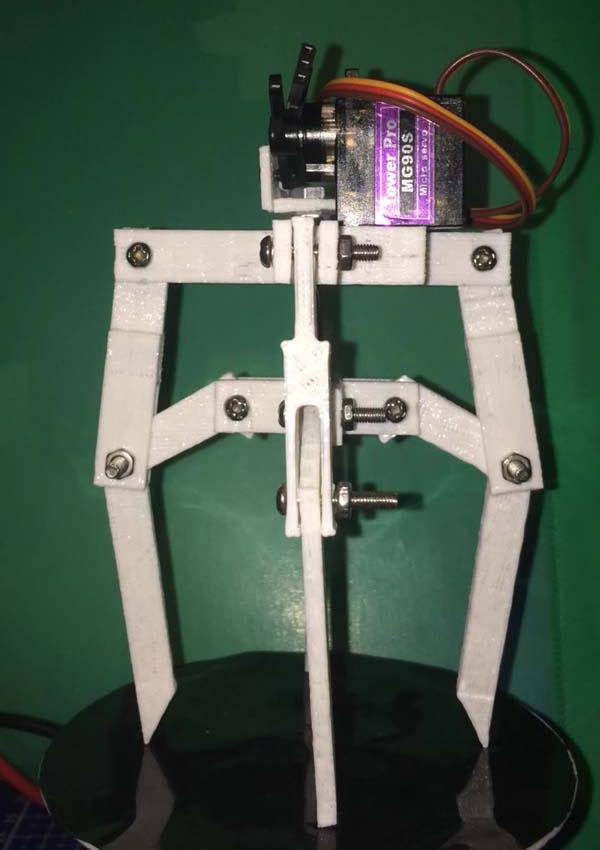
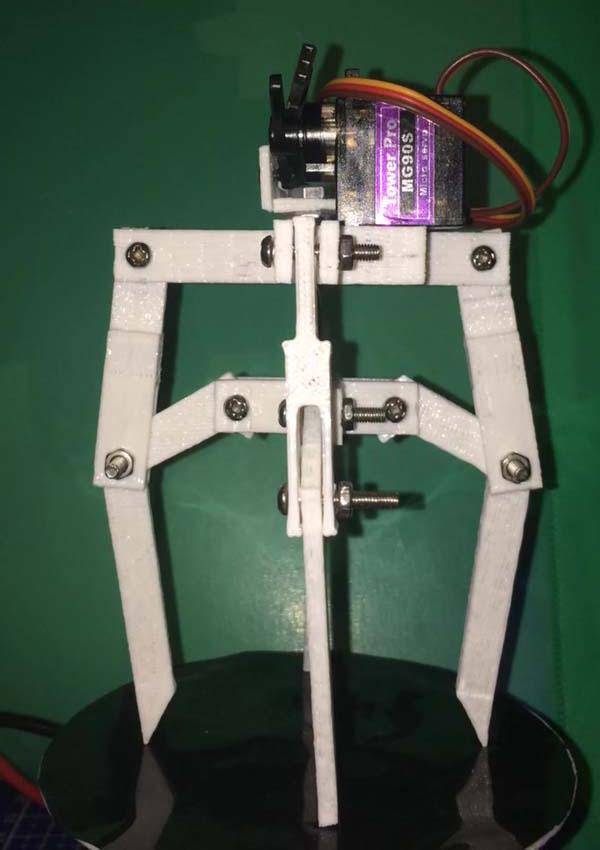
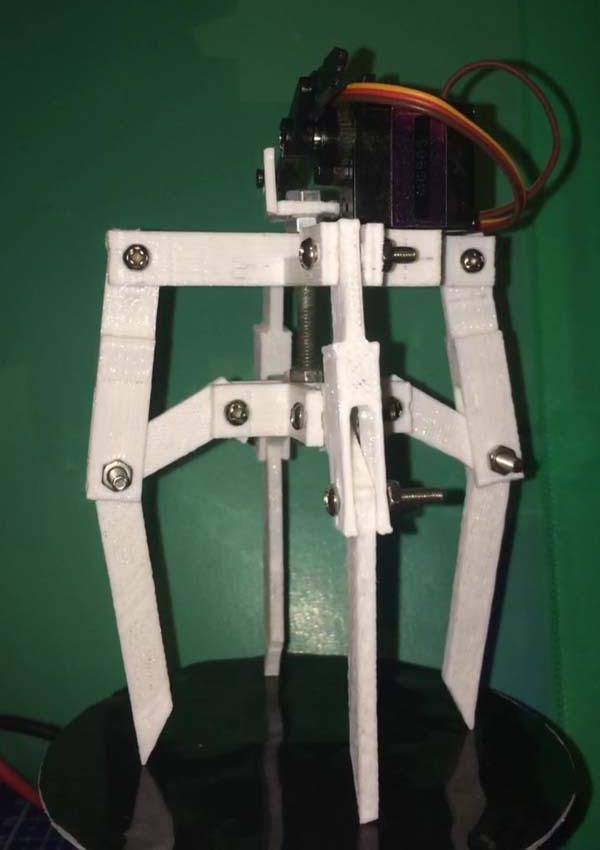









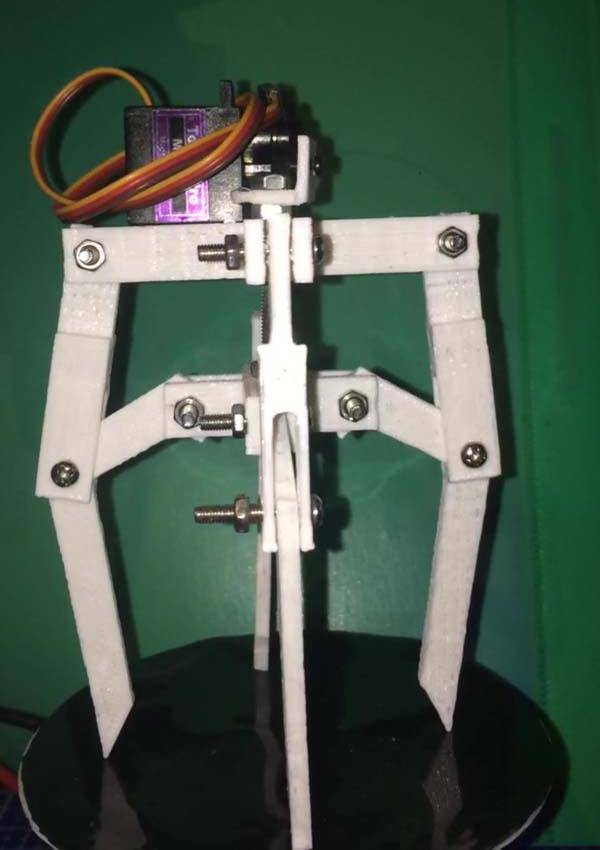

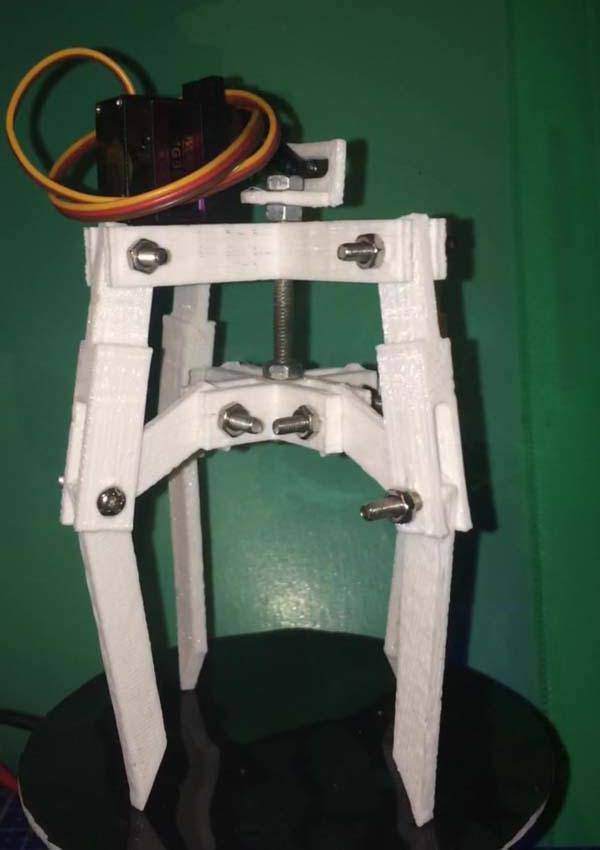



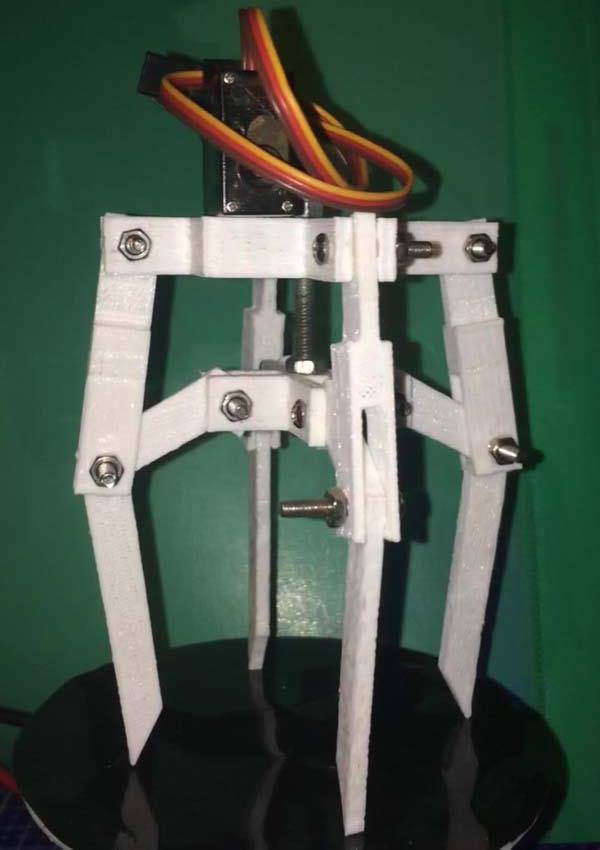


С изготовлением клешни особо не мучался и напечатал ее на 3D принтере.
Как подключить к Ардуино серво с джойстиком
Для этого занятия потребуется:
- Arduino Uno / Arduino Nano / Arduino Mega;
- микро сервопривод;
- джойстик ky-023;
- провода «папа-папа», «папа-мама».
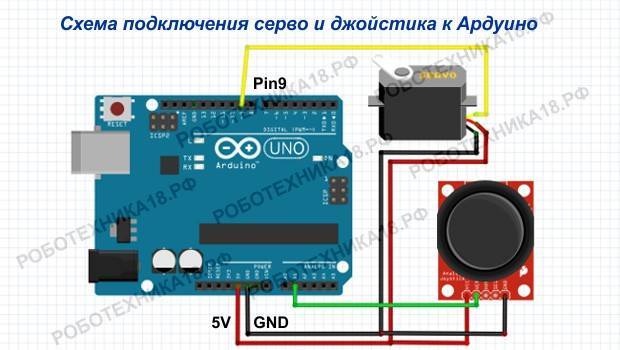
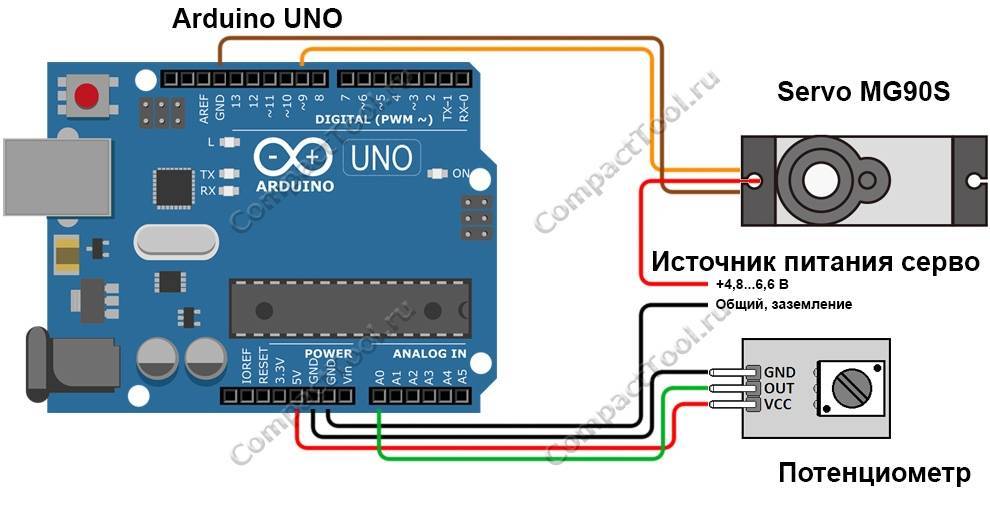
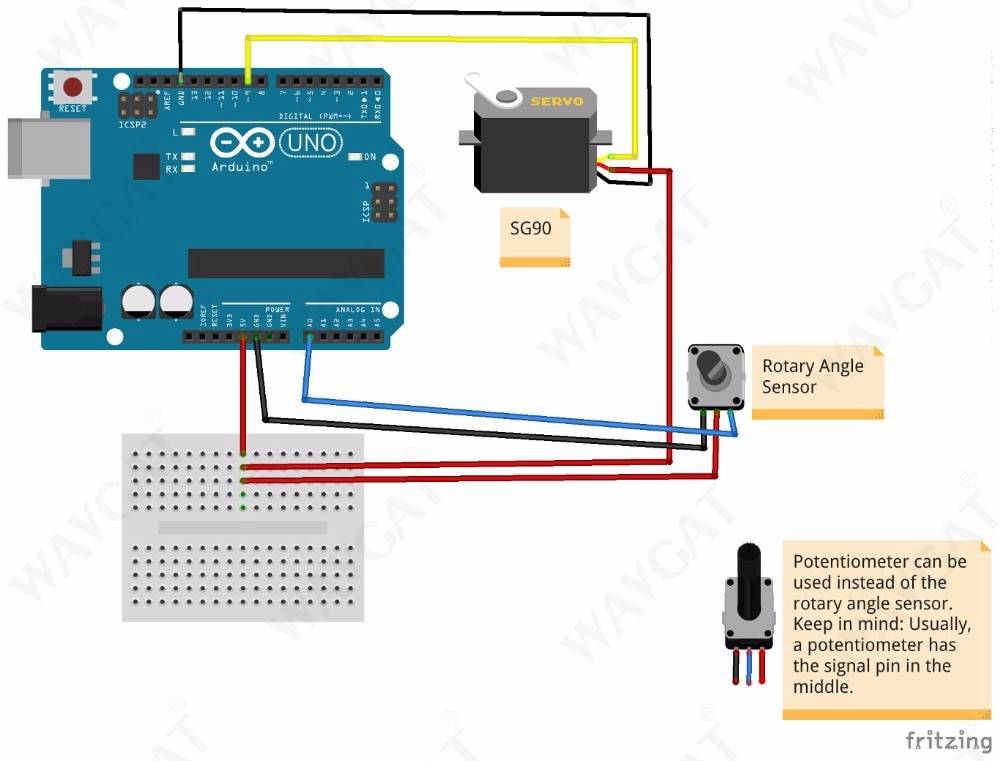
Схема подключения сервопривода к Ардуино с джойстиком
Подключите к плате Ардуино сервомотор и джойстик, согласно схеме, изображенной на картинке выше. И загрузите следующий скетч в микроконтроллер, позволяющий сделать плавное управление сервоприводом с помощью джойстика на Ардуино. В программе мы используем функцию map(), которая преобразует числовой диапазон значений 0-1023, в новый диапазон чисел 0-180 (угол поворота серво).
Скетч. Управление сервоприводом с помощью джойстика
#define pinX A1 // ось X джойстика
#include <Servo.h> // подключаем библиотеку для серво
Servo servo1; // объявляем объект servo1
void setup() {
pinMode(pinX, INPUT); // указываем пин для джойстика
servo1.attach(9); // указываем пин для микро серво
}
void loop() {
int X = analogRead(pinX); // считываем значение оси X
X = map(X, 0, 1023, 0, 180); // переводим значение X в новый диапазон
servo1.write(X); // поворачиваем серво от джойстика
}Пояснения к коду:
с помощью map() можно задать любой диапазон чисел, в том числе обратный;
обратите внимание, что у разных производителей распиновка джойстика может отличаться, от представленной выше схемы подключения модуля к плате.

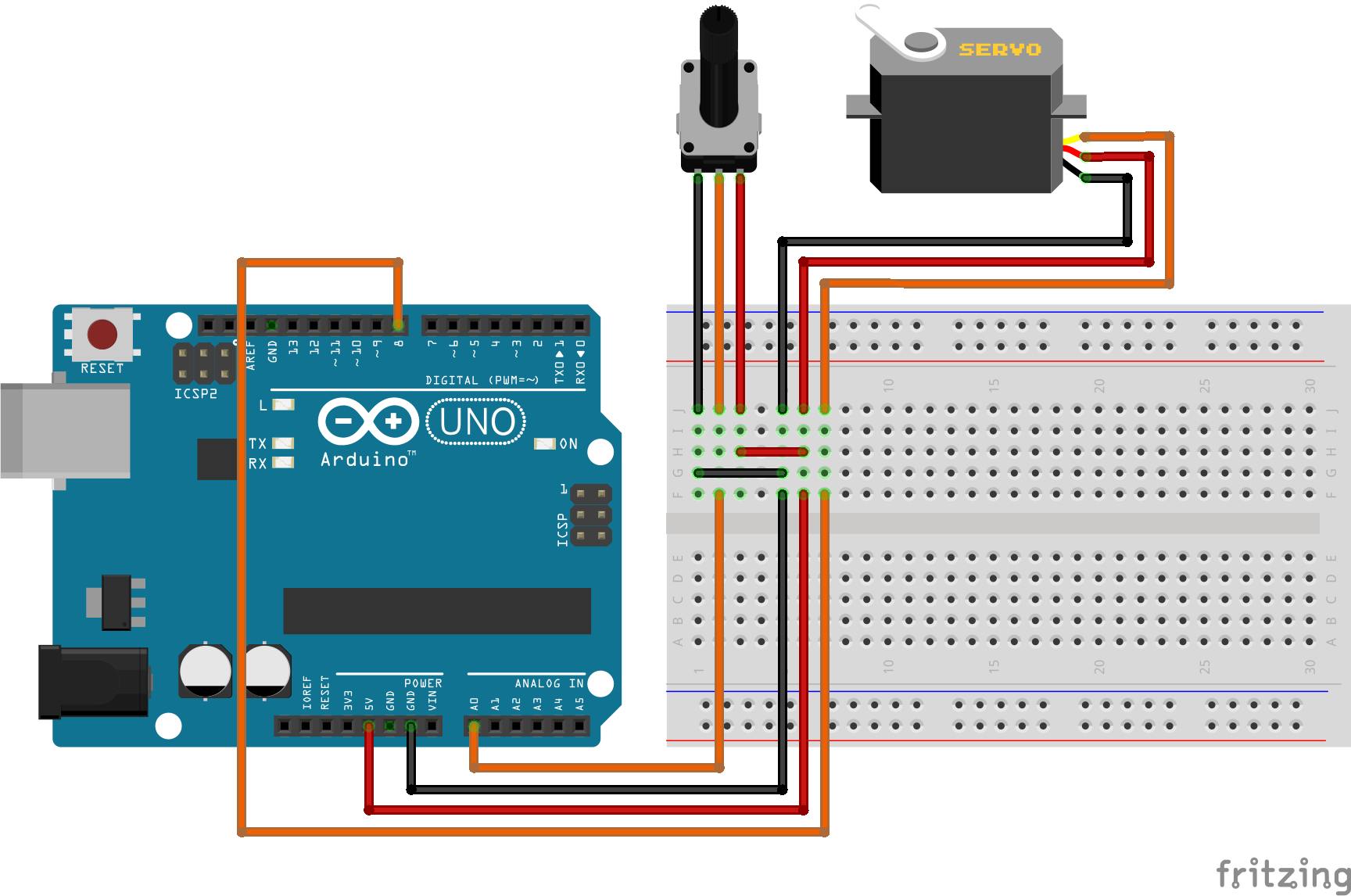
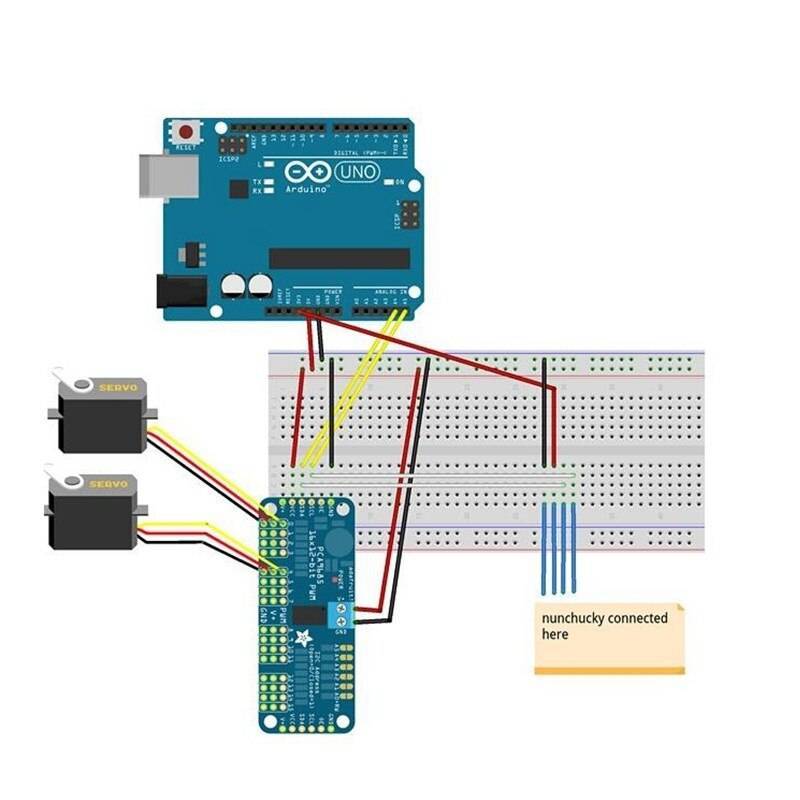
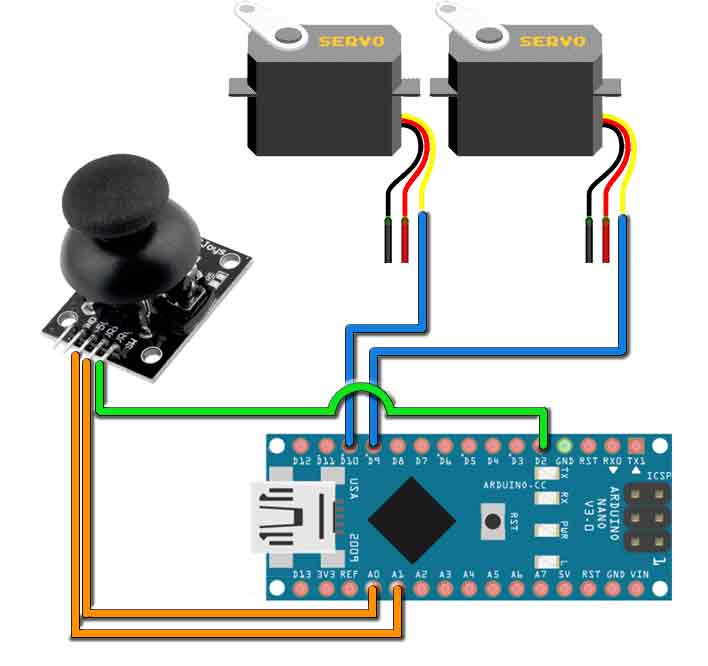
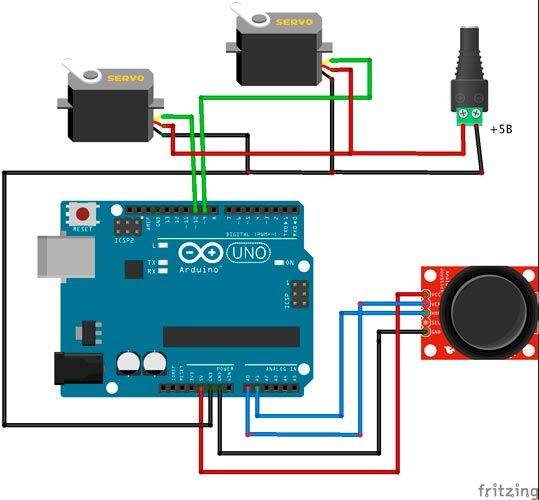
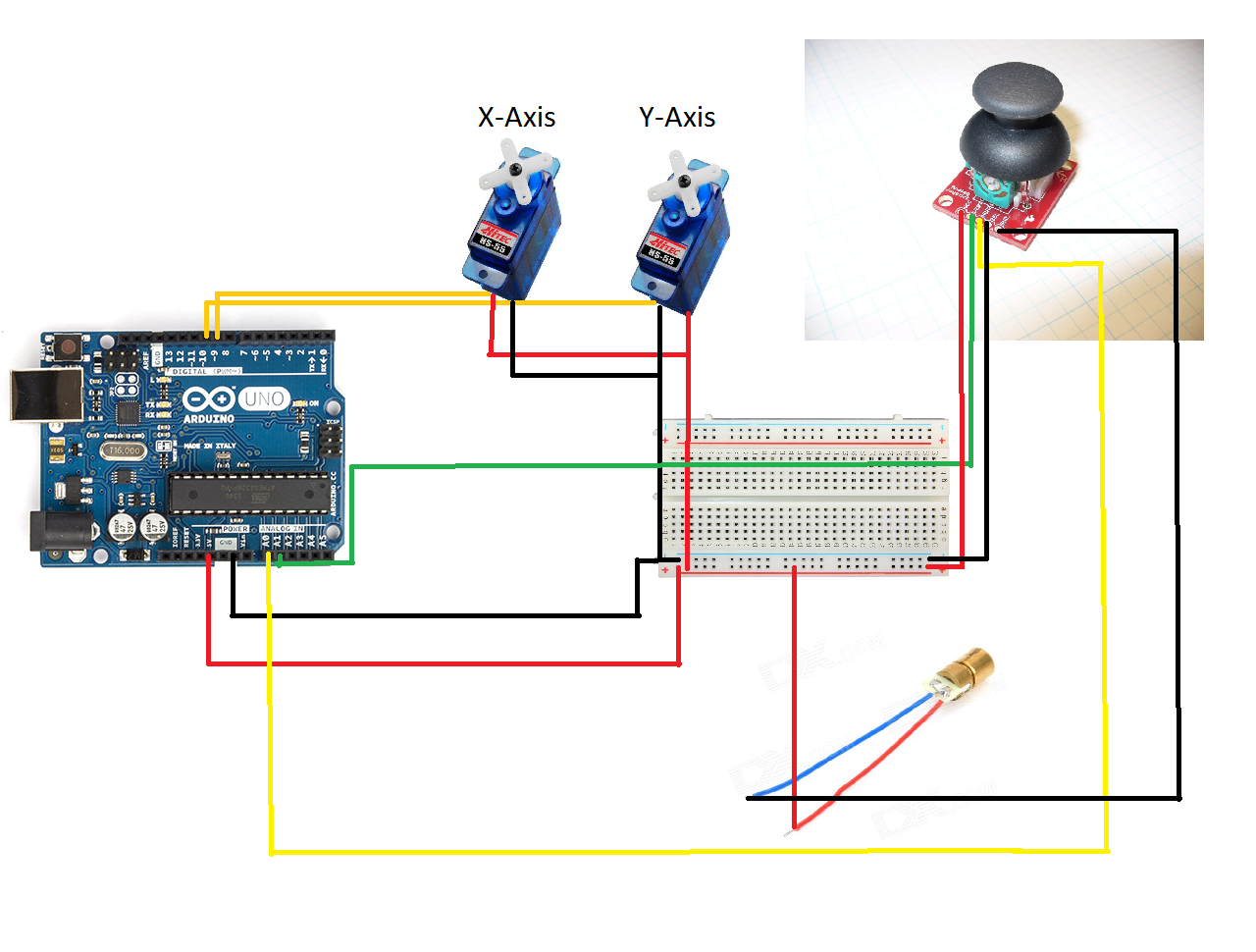
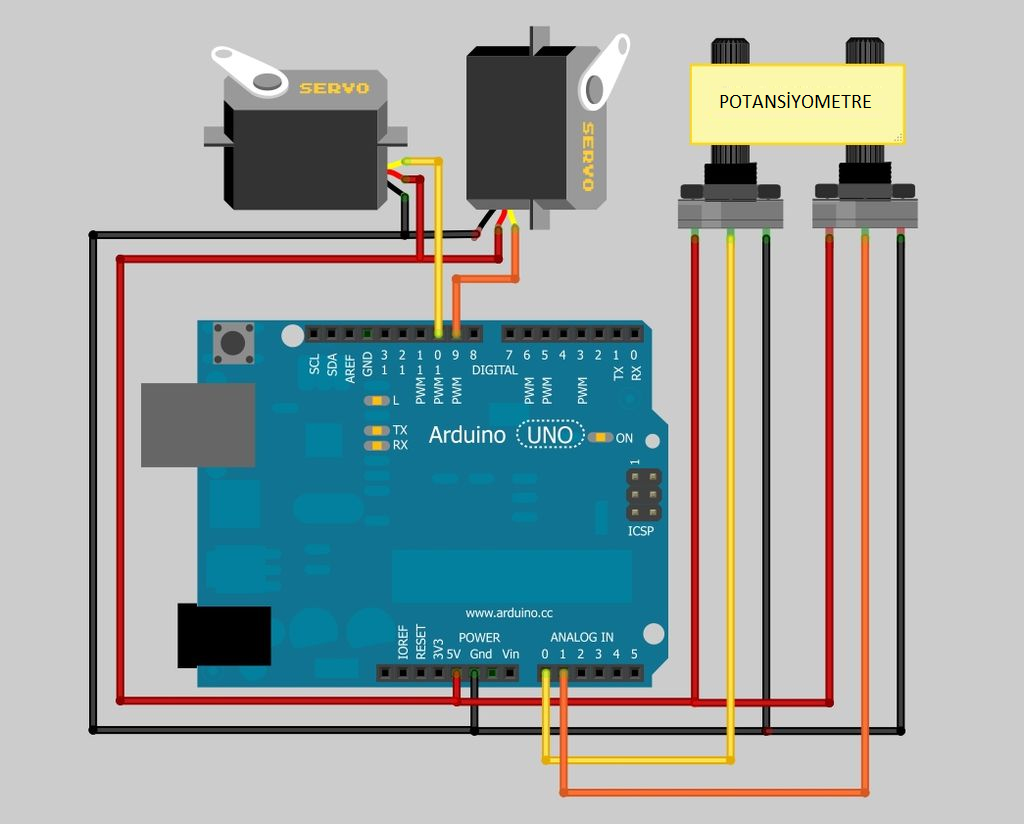
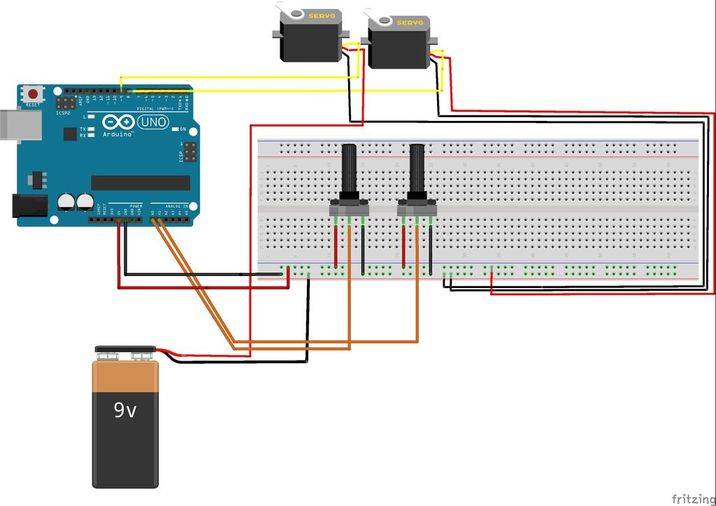
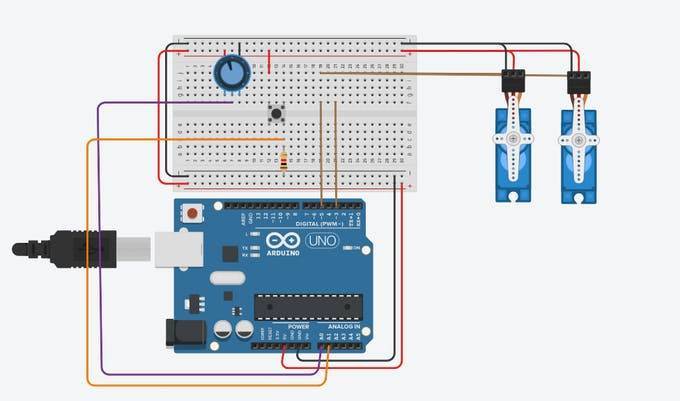
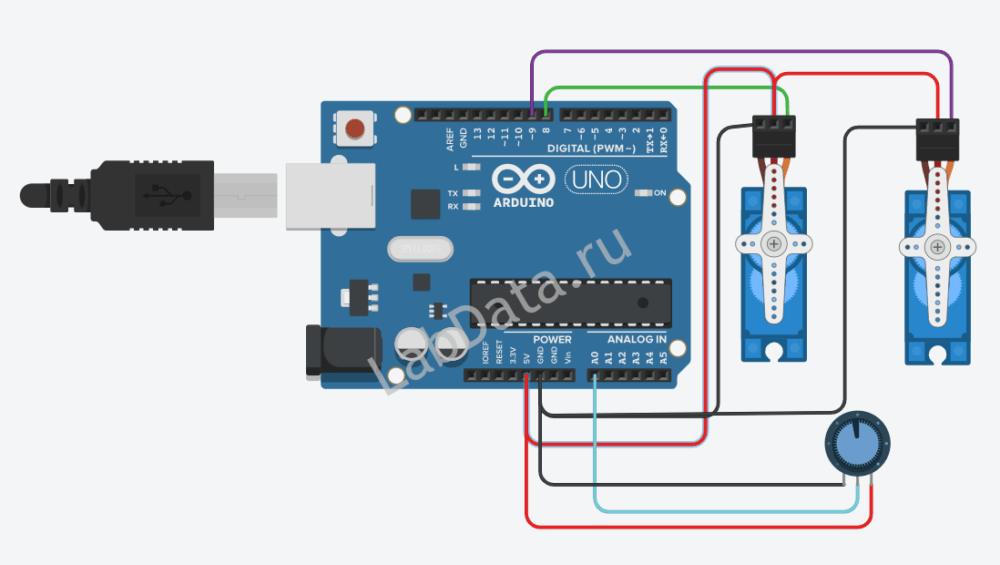
Схема подключения двух сервоприводов к Ардуино с джойстиком
Скетч. Управление двумя серво с помощью джойстика
#define pinX A1 // ось X джойстика
#define pinY A0 // ось Y джойстика
#include <Servo.h> // подключаем библиотеку для серво
Servo servo1; // объявляем объект servo1
Servo servo2; // объявляем объект servo2
void setup() {
pinMode(pinX, INPUT); // указываем пин для джойстика
pinMode(pinY, INPUT); // указываем пин для джойстика
servo1.attach(9); // указываем пин для первого серво
servo2.attach(11); // указываем пин для второго серво
}
void loop() {
int X = analogRead(pinX); // считываем значение оси X
int Y = analogRead(pinY); // считываем значение оси Y
X = map(X, 0, 1023, 0, 180); // переводим значение X в новый диапазон
Y = map(Y, 0, 1023, 0, 180); // переводим значение Y в новый диапазон
servo1.write(X); // поворачиваем первый серво
servo2.write(Y); // поворачиваем второй серво
}Пояснения к коду:
- в данной программе мы лишь добавили новую локальную переменную для значений оси Y джойстика, чтобы управлять вторым серво.
Библиотека Servo
Вы можете генерировать управляющие импульсы самостоятельно, но это настолько распространенная задача, что для ее упрощения существует стандартная библиотека сервоприводов.
Сервоприводом постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Разница в том, что функция Servo.write (angle) устанавливает не угол, а скорость вращения привода.
Библиотека сервоприводов позволяет программно управлять сервоприводами. Управление осуществляется следующими функциями:
- attach () — прикрепить объект к определенной булавке на доске. Есть два возможных синтаксиса для этой функции: servo.attach (pin) и servo.attach (pin, min, max). В этом случае штифт — это номер штифта, к которому подключен сервопривод, min и max — длины импульсов в микросекундах, отвечающие за углы поворота 0 ° и 180 °. По умолчанию они установлены на 544 мкс и 2400 мкс соответственно. Нет возвращаемого значения.
- write () — инструктирует сервопривод принять значение параметра. Синтаксис: servo.write (угол), где угол — это угол, на который сервопривод должен повернуть
- writeMicroseconds () — дает команду на отправку импульса определенной длины на сервопривод, это низкоуровневый аналог предыдущей команды. Синтаксис: servo.writeMicroseconds (uS), где uS — длина импульса в микросекундах. Нет возвращаемого значения.
- read () — считывает текущее значение угла, в котором находится сервопривод. Синтаксис: servo.read (), возвращается целочисленное значение от 0 до 180
- прикрепленный () — проверяет, был ли объект прикреплен к конкретному выводу. Синтаксис следующий: servo.attached (), boolean возвращается, если объект был прикреплен к какому-либо контакту, или false в противном случае
- detach () — выполняет действие, противоположное fixed (), т.е отсоединяет объект от булавки, к которой он был прикреплен. Синтаксис: servo.detach()
В библиотеке серво для Arduino по умолчанию установлены следующие длительности импульса: 544 мкс для 0 ° и 2400 мкс для 180°.
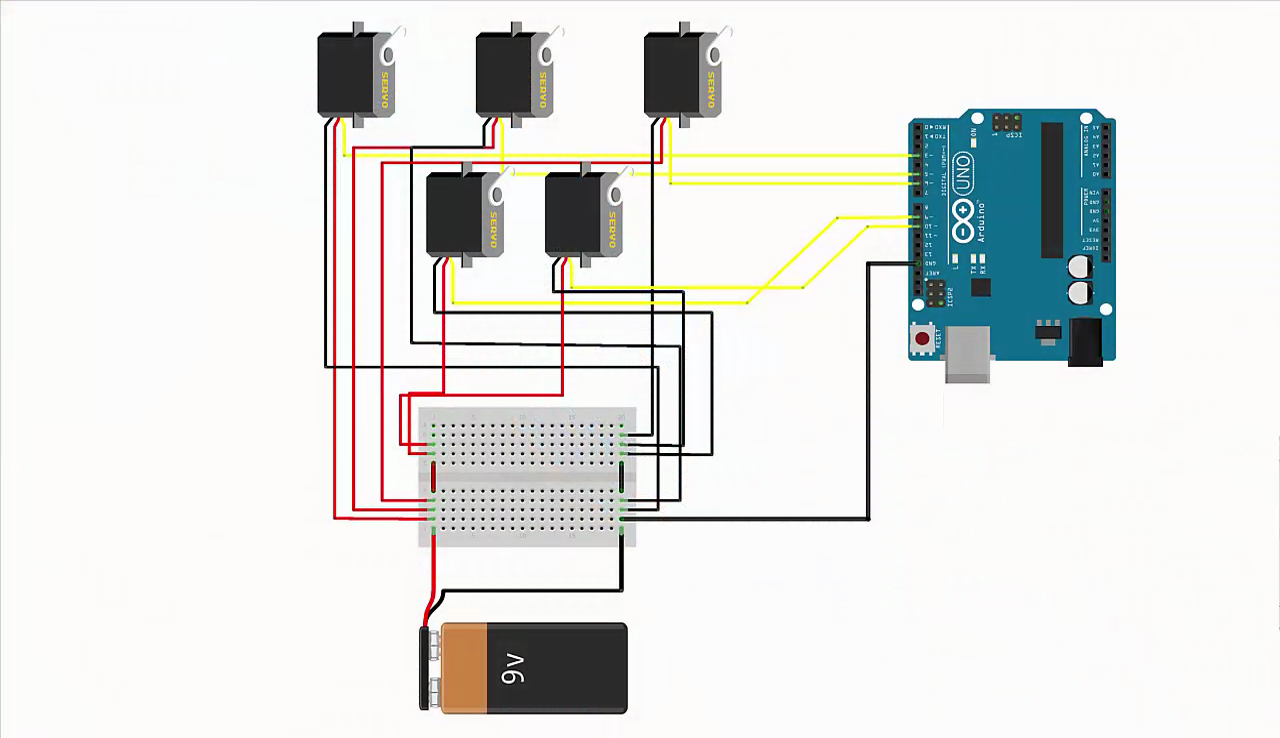
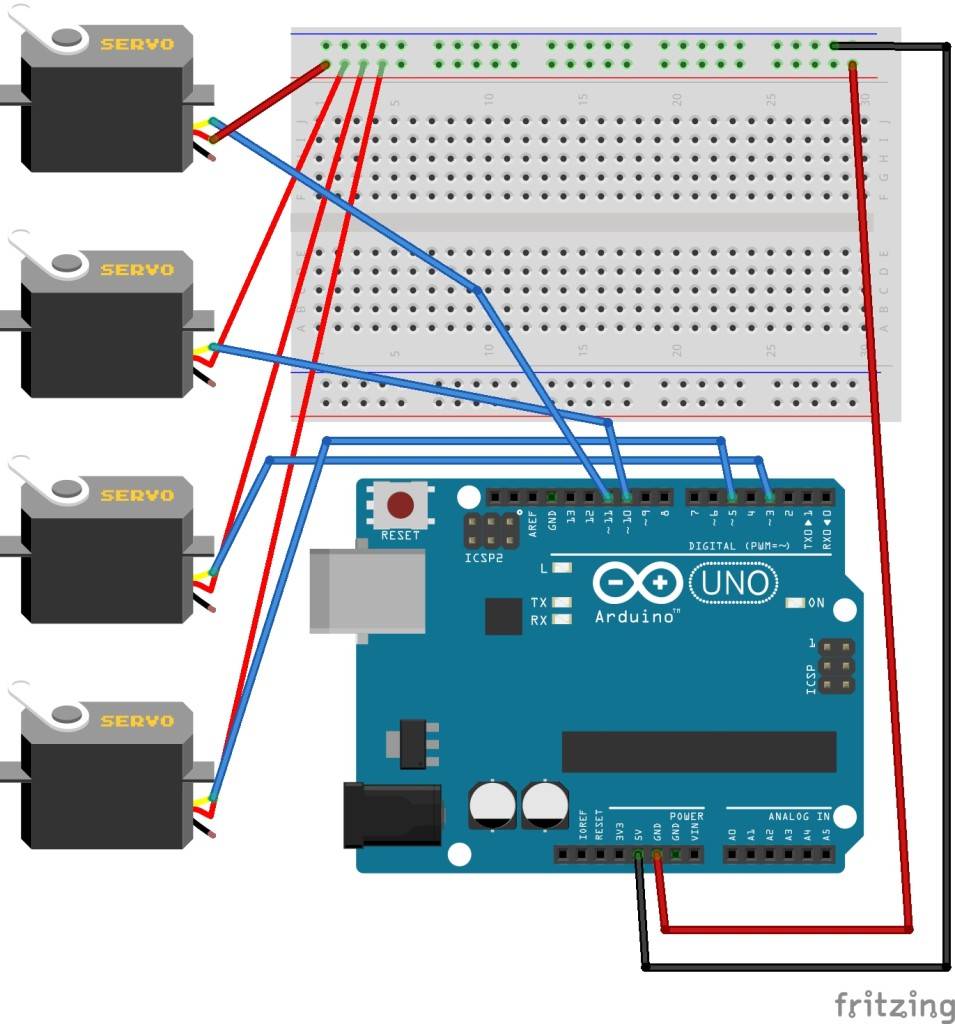
Пример подключения двух сервоприводов.
Библиотека сервопривода несовместима с библиотекой VirtualWire для передатчика и приемника 433 МГц, поскольку они используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для сервоуправления: Servo2. Все методы библиотеки Servo2 такие же, как и методы Servo.
Функции работают по-разному при работе с сервоприводами на 360 градусов.
| Серво. Запись (0) | Крайняя левая позиция | Полный ход в одном направлении |
| Сервопривод. Запись (90) | Центральное положение | Остановить сервопривод |
| Серво. Запись (180) | Крайняя правая позиция | Полный ход в обратном направлении |
Как выбрать сервопривод
Основные функции сервосистем
- Позиционирование (Positioning)
- Интерполяция (Interpolation)
- Синхронизация, электронный редуктор (Gear)
- Точное поддержание скорости вращения (шпиндель станка)
- Электронный кулачок (Cam)
- Программируемый логический контроллер.
Компоненты сервосистемы
В общем случае сервосистема (Motion Control System) может состоять из следующих устройств:
- Серводвигатель (Servo Motor) с круговым датчиком обратной связи по скорости (он же может выполнять функцию датчика положения ротора)
- Серворедуктор (Servo Gear)
- Датчик положения исполнительного механизма (например, линейный датчик координаты оси подач)
- Сервопривод (Servo Drive)
- Сервоконтроллер (Motion Controller)
- Операторский интерфейс (HMI).
Варианты аппаратно-программной реализации сервосистемы
- Сервосистема на базе ПЛК (PLC-based Motion Control)
- Функциональный модуль управления перемещением добавляется в корзину расширения ПЛК
- Автономный сервоконтроллер
- Сервосистема на базе ПК (PC-based Motion Control)
- Специальный софт Motion Control для планшетного ПК с пользовательским интерфейсом (HMI)
- Programmable Automation controller (PAC) с функцией управления перемещением
- Сервосистема на базе привода (Drive-based Motion Control)
- Преобразователь частоты со встроенным сервоконтроллером
- Опциональное программное обеспечение, которое загружается в привод и дополняет его функциями управления движением
- Опциональные платы с функциями управления движением, которые встраиваются в привод.
Типы серводвигателей
- Синхронные
Компактные бесщёточные серводвигатели с возбуждением от постоянных магнитов (вентильные), обеспечивающие высокую динамику и точность.
- Асинхронные
Приводы главного движения и шпинделей инструментальных станков.
- Прямой привод (Direct Drive)
Прямой привод не содержит промежуточных передаточных механизмов (шарико-винтовых пар, ремней, редукторов):
- Линейные двигатели (Linear Motors) могут поставляться вместе с профильными рельсовыми направляющими
- Моментные двигатели (Torque Motors) — синхронные многополюсные машины с возбуждением от постоянных магнитов, с жидкостным охлаждением, ротор с полым валом. Обеспечивают высокую точность и мощность на низких оборотах.
Преимущества серводвигателей
- Высокое быстродействие, динамика и точность позиционирования
- Высокомоментные
- Малоинерционные
- Большая перегрузочная способность по моменту
- Широкий диапазон регулирования
- Бесщёточные.
Преимущества линейных приводов
Отсутствие кинематических цепей для преобразования вращательного движения в линейное:
- Меньше инерционность
- Нет зазоров
- Меньше температурные и упругие деформации
- Меньше износ и снижение точности при эксплуатации
- Меньше потери на трение – выше КПД.
Точность
Микронная точность требуется в металлообрабатывающих станках с ЧПУ, а в штабелёрах достаточно и сантиметра. От точности зависит выбор серводвигателя и сервопривода.
- Точность позиционирования
- Точность поддержания скорости
- Точность поддержания момента.
Приводы и двигатели постоянного тока
Электродвигатели
Модуль энкодер Ардуино: схема, распиновка
Энкодер служит для преобразования угла поворота в электрический сигнал. При вращении ручки модуля мы получаем два сигнала (A и B), которые противоположны по фазе. Сигналы A и B зависят друг от друга при вращении энкодера Ардуино по часовой или против часовой стрелки. Для считывания сигнала A и B с энкодера можно использовать, как цифровые, так и аналоговые порты микроконтроллера.
Распиновка и принципиальная схема модуля энкодера
Каждый раз, когда сигнал A переходит от положительного уровня к нулю, мы считываем значение сигнала B (смотри диаграмму выше). Если сигнал B находится в этот момент в положительном состоянии, значит энкодер вращается по часовой стрелке, если B равен нулю, то энкодер вращается против часовой стрелки. Считывая оба выхода при помощи Ардуино, можно определить направление и угол поворота.
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол поворота 180 градусов, что они называют «сервоприводом на 180 градусов°».
Но есть сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы на 360 градусов°».
| Серво. Запись (0) | Крайняя левая позиция | Полный ход в одном направлении |
| Сервопривод. Запись (90) | Центральное положение | Остановить сервопривод |
| Серво. Запись (180) | Крайняя правая позиция | Полный ход в обратном направлении |
Для иллюстрации работы с постоянно вращающимися сервоприводами мы собрали двух мобильных роботов: на Arduino Uno и Iskra JS. Инструкции по сборке и примеры эскизов см. В статье Сборка ИК-бота.
Виды сервоприводов
Сервоприводы отличаются по сигналу управления и способу преобразования электрической энергии в механическую.
Сервоприводы PDM с удержанием угла
Сервоприводы с интерфейсом PDM (PWM), которые преобразуют управляющие сигналы в установку и удержание заданного угла.
Сервоприводы PDM постоянного вращения
Сервоприводы с интерфейсом PDM (PWM), которые преобразуют управляющие сигналы, чтобы поддерживать заданную скорость вращения вала в любом направлении без ограничений по углу поворота.
Сервоприводы STS
Сервоприводы с интерфейсом STS, которые преобразуют управляющие сигналы, чтобы поддерживать заданную скорость вращения вала в любом направлении без ограничений по углу поворота.
Код программы для HTML файла
Полный текст программы HTML файла, который вы скачали по вышеприведенной ссылке, выглядит следующим образом.
XHTML
<!DOCTYPE html >
<html>
<head>
<title>Web controlled Servo</title>
<script src=”jquery.js”></script>
</head>
<body>
<h1> <b> Web Controlled Servo by circuitdigest.com </b> </h1>
<h4> <b> Enter the IP address of esp8266 shown in the serial monitor below </b> </h4>
<div style=”margin: 0; width:500px; height:80px;”>
<FORM NAME=”form” ACTION=”” METHOD=”GET”>
ESP8266 IP Address:
<INPUT TYPE=”text” NAME=”inputbox” VALUE=”192.168.0.9″>
</FORM>
</div>
<h3> Scroll it to move servo 1 </h3>
<input type=”range” min=”20″ max=”170″ onmouseup=”servo1(this.value)” />
</body>
<script>
$.ajaxSetup({timeout:1000});
function servo1(angle)
{
TextVar = form.inputbox.value;
ArduinoVar = “http://” + TextVar + “:80”;
$.get( ArduinoVar, { “sr1”: angle }) ;
{Connection: close};
}
</script>
</html>
1 | <!DOCTYPE html > <title>Web controlled Servo</title> <script src=”jquery.js”></script> <h1><b> Web Controlled Servo by circuitdigest.com </b></h1> <h4><b> Enter the IP address of esp8266 shown in the serial monitor below </b></h4> <div style=”margin: 0; width:500px; height:80px;”> <FORM NAME=”form”ACTION=””METHOD=”GET”> ESP8266 IP Address: <INPUT TYPE=”text”NAME=”inputbox”VALUE=”192.168.0.9″> </FORM> </div> <h3> Scroll it to move servo 1 </h3> <input type=”range”min=”20″max=”170″onmouseup=”servo1(this.value)” /> </body> $.ajaxSetup({timeout1000}); functionservo1(angle) { TextVar=form.inputbox.value; ArduinoVar=”http://”+TextVar+”:80″; $.get(ArduinoVar,{“sr1″angle}); {Connectionclose}; } |
Тег <!DOCTYPE html > сообщает веб-браузеру какую версию html мы использовали для написания нашего кода. Этот тэг должен быть записан в самом верху документа, все остальные строки файла должны быть записаны после него.
Код, записанный между тегами <html> </html>, считывается браузером. То есть эти теги обозначают начало и конец html-документа. Код, записанный вне этих тегов, не будет отображаться на веб-странице. Теги <head> </head> используются для задания названия документа, ссылок, jQuery и стилей. Мы в нашем коде указали название веб-страницы и скрипт jQuery. Данные, записанные между тегами <title></title>, будут обозначать название вкладки в браузере. В нашем коде мы дали ей имя “Web Controlled Servo”.
Теги <script></script> используются чтобы подключить jQuery, который представляет собой библиотеку JavaScript и значительно упрощает наш код.
Теги body используются чтобы определить такие элементы на веб-странице как текстовые поля, слайдеры, кнопки и т.д. Также мы можем определить размеры этих элементов. Теги заголовков h1, h2, h3, h4, h5 и h6 используются для задания размера шрифта этих заголовков. В нашем коде мы использовали заголовки h1, h3 и h4.
Затем мы создали текстовое поле (textbox) чтобы записать в нем IP адрес. Он будет соответствовать IP адресу ESP8266, который будет передавать данные на этот IP адрес. После этого в коде файла мы создаем слайдер (input type=”range”) который будет передавать значение функции “servo1”, которое будет соответствовать углу поворота оси сервомотора от 20 до 170 градусов.
Arduino
function servo1(angle)
{
TextVar = form.inputbox.value;
ArduinoVar = “http://” + TextVar + “:80”;
$.get( ArduinoVar, { “sr1”: angle }) ;
{Connection: close};
}
1 | functionservo1(angle) { TextVar=form.inputbox.value; ArduinoVar=”http://”+TextVar+”:80″; $.get(ArduinoVar,{“sr1″angle}); {Connectionclose}; } |
Затем эта функция будет исполняться и передавать значение плате Arduino, чтобы она повернула ось сервомотора на нужный угол и закрыла бы соединение.
4.7. Устойчивость усилителей с обратной связью
Усилители с ООС при определённых условиях могут самовозбуждаться, т.е. генерировать электрические колебания. Это свидетельствует о том, что усилитель прекращает свои функции по усилению электрических колебаний. При этом ООС превращается в ПОС. это происходит обычно за пределами рабочего диапазона частот из-за фазовых сдвигов в усилителе и в цепи обратной связи. Фаза как аргумент вектора петлевого коэффициента передачи Т изменяется:
Т = – β·К·е j∆φβК;
где величина ∆φβК определяется как сумма фазовых сдвигов в усилителе и в четырёхполюснике обратной связи:
∆φβК = ∆φК + ∆φβ ; (4.13)
Уравнение (4.13) определяет дополнительный фазовый сдвиг к 180º между векторными источниками сигнала UВХ.ИСТ и UВХ.СВ., т.е. (180º + ∆φβК). Причиной изменения фазы являются реактивные элементы схемы, а на высоких частотах дополнительно инерционность работы усилительных элементов.
При ООС и ПОС величина Т является действительной:
FООС = 1 + ТООС > 1;
FПОС = 1 – ТПОС < 1;
Пока ТПОС < 1, усилитель не возбуждается, хотя ООС превращается в ПОС, т.е. она оказывается ещё недостаточно глубокой для самовозбуждения. Генерация наступает при:
ТПОС = 1;
и коэффициент усиления с обратной связью будет иметь бесконечно большое значение:
;
Практически усилитель возбуждается на низких и высоких частотах при:
ТПОС ≥ 1 и φβК= 180º + ∆φβК
Для оценки устойчивости усилителя с обратной связью используются различные критерии. Наиболее приемлемым оказался критерий Найквиста, который заключается в следующем: “Если точка с координатами (–1;0) лежит внутри годографа вектора β К для диапазона частот от 0 до ∞, то система неустойчива, рис. 4.7а; если же точка (–1;0) лежит вне указанного годографа, система устойчива, рис. 4.7б”
Рис. 4.7. Диаграммы Найквиста для неустойчивого а) и устойчивого усилителей б) с обратной связью.
Для повышения устойчивости усилителей разработаны методы, суть которых сводится к следующему.
- В усилителе с обратной связью следует охватить как можно меньше число каскадов, т.к. это уменьшает сдвиг фаз петли обратной связи
- Применять в охваченных обратной связью каскадах схемы межкаскадовой связи, дающие малые фазовые сдвиги.
- При проектировании усилителей задаются допустимой степенью приближения годографа Т к критической точке; эта степень получала название запаса устойчивости усилителя. Различают запас устойчивости по модулю “X”
X = – 20lg |TX| при arg TX = π; и запас устойчивости по фазе “Y”;
πY = π – arg T при |TX| = 1
Для групповых усилителей, имеющих глубокую ООС принимают запасы устойчивости: по модулю 3n дБ, а по фазе 0,175 рад (10n град.), где n – число усилительных каскадов.
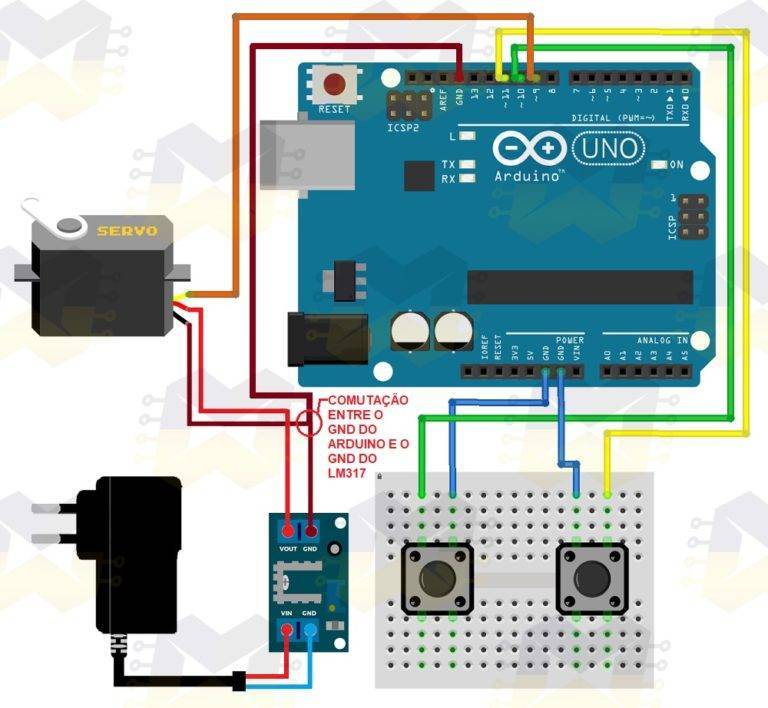
Сервопривод mg90s и arduino
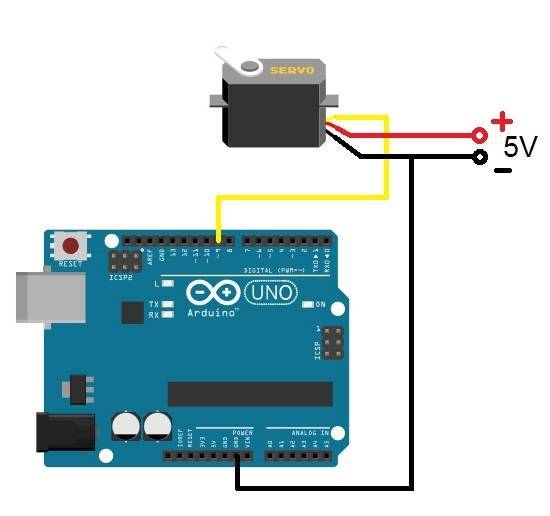
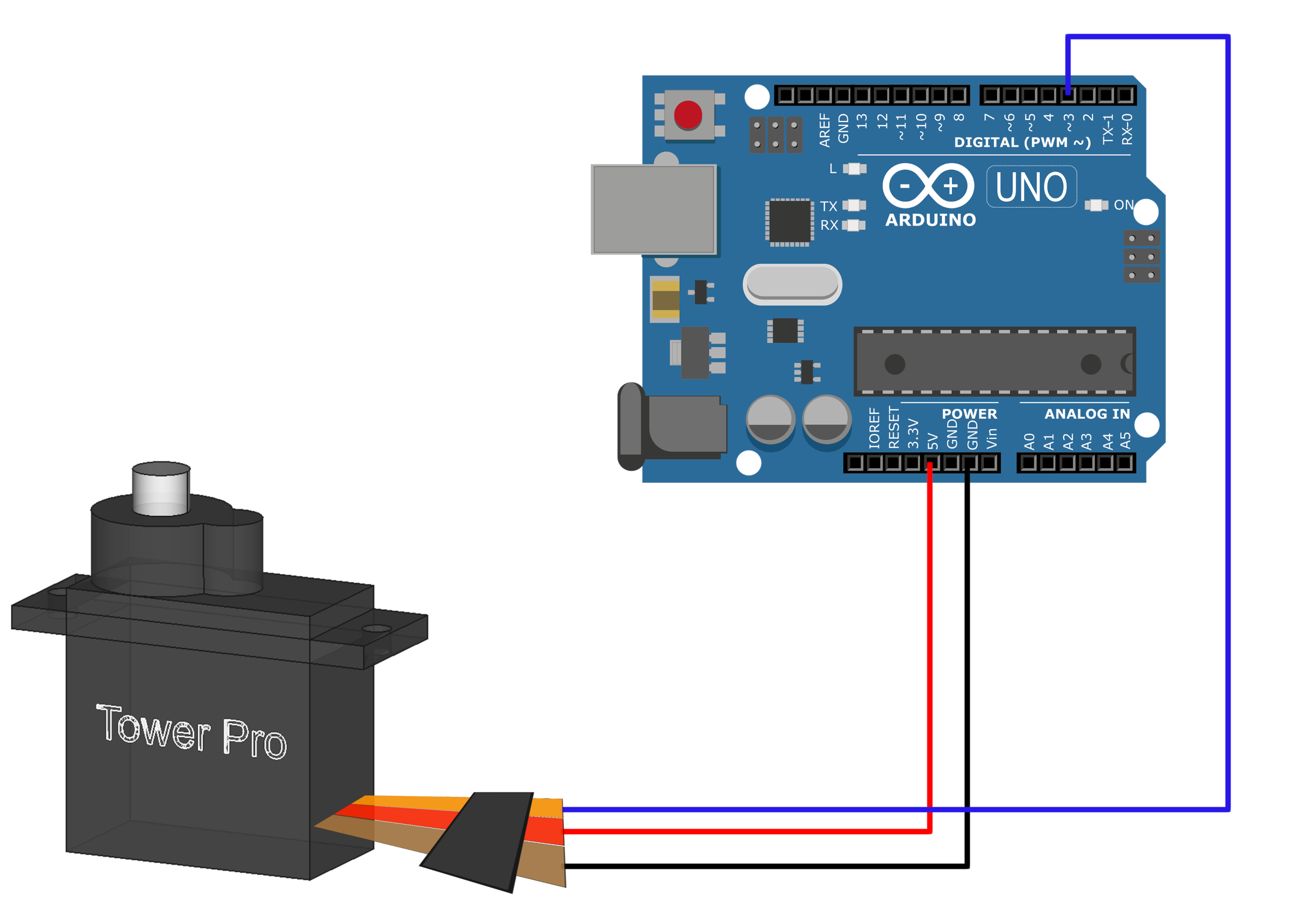
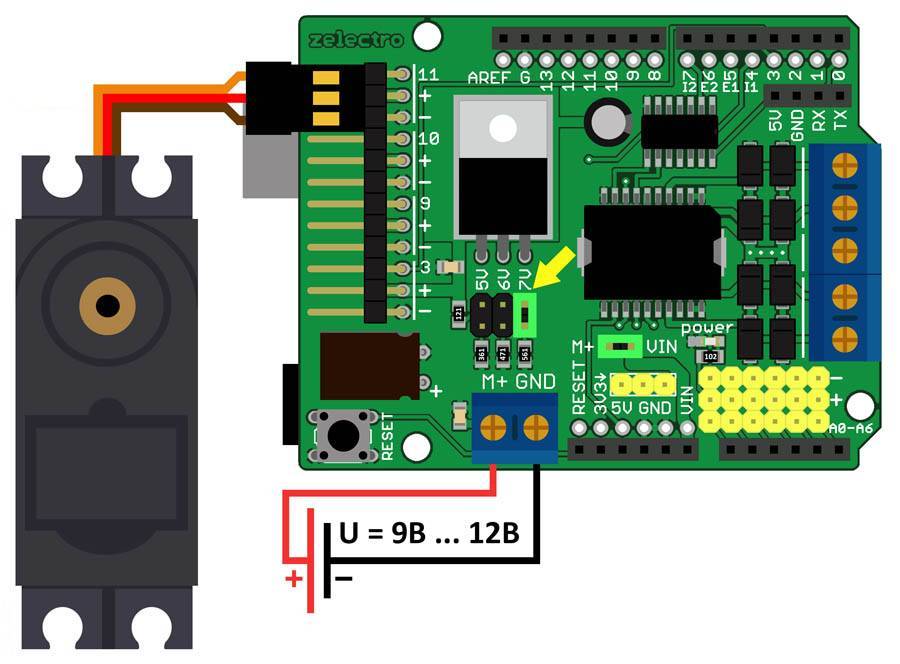
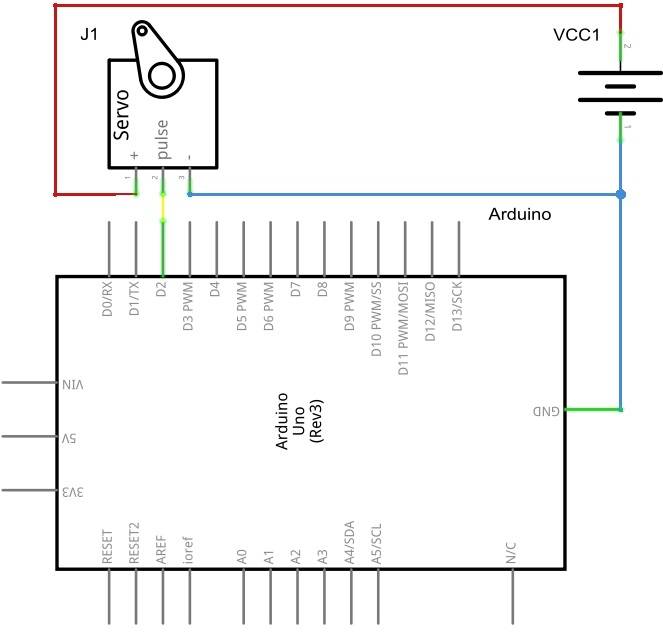
Для автоматического сжатия и раскрытия клешни я использовал сервопривод mg90s, он является копией sg90, про который я уже как-то писал статью: пример использования сервопривода sg90. Единственное отличие этих сервоприводов в том, что mg90s имеет внутри металлические шестерни на редукторе. Что делает его более долговечным и соответственно немного дороже. Во всем остальном полная идентичность. Mg90s имеет три провода: красный – это 5 вольт, коричневый – GND и оранжевый для передачи сигнала.
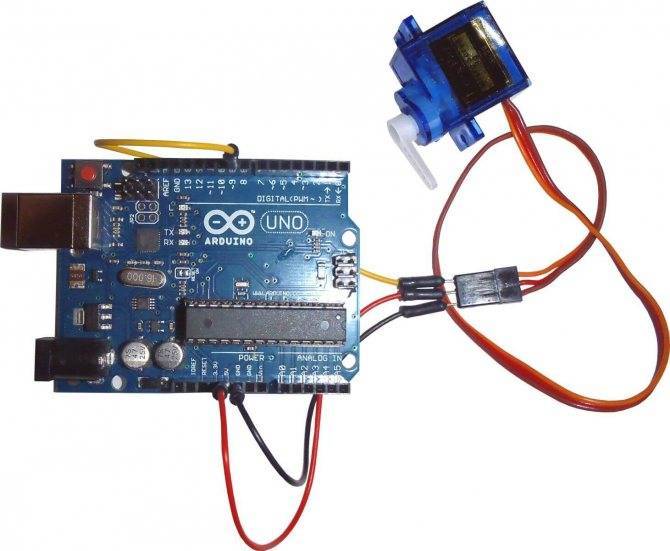
Для подключения сервопривода mg90s к ардуино соединяем провода питания напрямую, а также провод для передачи сигнала к любому цифровому пину, например 10.
vri-cnc.ru
Шаговые двигатели – дешевле. Однако сервоприводы обладают широким рядом достоинств, в том числе высокой производительностью и точностью позиционирования. Так что же выбрать?
Что такое шаговый электродвигатель
 Шаговый электродвигатель – это безщеточный синхронный электродвигатель постоянного тока, имеющий несколько обмоток статора. При подаче тока в одну из обмоток ротор поворачивается, а затем фиксируется в определенном положении. Последовательное возбуждение обмоток через контроллер управления шаговым двигателем позволяет вращать ротор на заданный угол.
Шаговый электродвигатель – это безщеточный синхронный электродвигатель постоянного тока, имеющий несколько обмоток статора. При подаче тока в одну из обмоток ротор поворачивается, а затем фиксируется в определенном положении. Последовательное возбуждение обмоток через контроллер управления шаговым двигателем позволяет вращать ротор на заданный угол.
Шаговые электродвигатели широко применяются в промышленности, так как имеют высокую надежность и длительный срок службы. Главное преимущество шаговых двигателей – точность позиционирования. При подаче тока на обмотки ротор провернется строго на определенный угол.
Положительные стороны шагового двигателя
·Устойчивость в работе;
·Высокий крутящий момент на малых и нулевых скоростях;
·Быстрый старт, остановка и реверс;
·Работа под высокой нагрузкой без риска выхода из строя;
·Единственный механизм износа, влияющий на длительность эксплуатации – подшипники;
·Невысокая стоимость.
Отрицательные стороны шагового двигателя
·Высокий уровень шума;
·Возможность появления резонанса;
·Постоянный расход электроэнергии вне зависимости от нагрузки;
·Падение крутящего момента на высоких скоростях;
·Отсутствие обратной связи при позиционировании;
·Низкая пригодность к ремонту.
Что такое серводвигатель (сервопривод)
 Серводвигатель (сервопривод) – это электрический мотор с управлением через обратную отрицательную связь, которая позволяет точно управлять параметрами движения, чтобы достичь необходимой скорости или получить нужный угол поворота. В состав серводвигателя входят непосредственно сам электродвигатель, датчик обратной связи, блок питания и управления.
Серводвигатель (сервопривод) – это электрический мотор с управлением через обратную отрицательную связь, которая позволяет точно управлять параметрами движения, чтобы достичь необходимой скорости или получить нужный угол поворота. В состав серводвигателя входят непосредственно сам электродвигатель, датчик обратной связи, блок питания и управления.
Конструктивные особенности электродвигателей для сервопривода мало чем отличаются от обычных электродвигателей имеющих статор и ротор, работающих на постоянном и переменном токе, с щетками и без щеток. Особую роль здесь играет датчик обратной связи, который может быть установлен как непосредственно в самом двигателе и передавать данные о положении ротора, так и определять его позиционирование по внешним признакам. С другой стороны, работа серводвигателя немыслима без блока питания и управления (он же инвертор или сервоусилитель), который преобразует напряжение и частоту тока, подаваемого на электродвигатель, тем самым управляя его действием.
Положительные стороны серводвигателя (сервопривода)
·Высокая мощность при малых размерах;
·Высокий крутящий момент;
·Быстрый разгон и торможение;
·Постоянное и бесперебойное отслеживание положения;
·Низкий уровень шума, отсутствие вибраций и резонанса;
·Широкий диапазон скорости вращения;
·Высокая скорость разгона;
·Точное позиционирование;
·Стабильная работа в широком диапазоне скоростей;
·Малая масса и компактная конструкция;
·Низкий расход электроэнергии при малых нагрузках.
Отрицательные стороны серводвигателя (сервопривода)
·Требовательность к периодическому обслуживанию (например, с заменой щеток);
·Дорогостоящий ремонт;
·Сложность устройства (наличие датчика, блока питания и управления) и логики его работы.
·Высокая стоимость.
Сервопривод или шаговый двигатель?
Сравнивая характеристики сервопривода и шагового двигателя, следует обратить внимание, прежде всего, на их производительность и стоимость. Для производства фасадов МДФ на небольшом предприятии, работающем с малыми объемами, думаю, нет необходимости переплачивать за установку на фрезерный станок с ЧПУ дорогостоящих серводвигателей. С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла
С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла
Для производства фасадов МДФ на небольшом предприятии, работающем с малыми объемами, думаю, нет необходимости переплачивать за установку на фрезерный станок с ЧПУ дорогостоящих серводвигателей. С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла.
Примеры работы для Espruino
В качестве мозга для работы с Multiservo Shield v2 рассмотрим платформы из семейства Espruino, например Iskra JS.
Подключение и настройка
Для старта необходимо и .
Аппаратная часть
На низком уровне драйвер сервоприводов общается с управляющей электроникой по интерфейсу I²C.
Подробнее про I²C в Espruino
- Установите Multiservo Shield сверху на Iskra JS методом бутерброда.
- Соедините плату Iskra JS с компьютером по USB.
- Подключите силовое питание к драйверу сервоприводов через силовой клеммник. Диапазон входного напряжение должен соответствовать рабочему напряжению будущих сервоприводов, т.е. сколько приложили на силовой клеммник, столько и поступит на линию питания сервоприводов. В качестве источника питания рекомендуем взять:
- Сборку из батареек AA:
- Стационарный блок питания:
Программная часть
- Заведите Iskra JS.
На этом установка закончена, теперь смело переходите к экспериментам.
Управление одним сервоприводом
Рассмотрим базовый пример — подключим один сервопривод к 7 пину Multiservo Shield и заставим его плавно вращаться от 0 до 180 градусов.
Код для Iska JS
- multiservo-sweep.js
// Настраиваем шину I2C PrimaryI2C.setup({sda SDA, scl SCL, bitrate 400000}); // Создаем новый объект Multiservo var multiservo = require('@amperka/multiservo').connect(PrimaryI2C); // Создаем новый объект сервопривода // подключенны к контакту 7 var servo = multiservo.connect(7); // Создаём объект анимация // для плавного изменения параметров вращения мотора var animServo = require('@amperka/animation').create({ // Начальное значение в градусах from , // Конечное значение в градусах to 180, // Продолжительность полного перехода // за 5 секунд мотор пройдёт диапазон значений от 0 до 180 duration 5, // Шаг обновления: каждые 20 мс updateInterval 0.02 }).queue({ // Начальное значение в градусах from 180, // Конечное значение в градусах to , // продолжительность полного перехода // за 5 секунд мотор пройдёт диапазон значений от 180 до 0 duration 5 }); // Обработчик анимации animServo.on('update', function(val) { servo.write(val); }); // Запускаем анимацию setInterval(() => { animServo.play(); }, 1000);
После прошивки устройства вал мотора будет плавно перемещаться от 0 до 180 градусов и так по кругу.
Скетч для управления сервоприводом в Arduino
Для управления углом поворота сервопривода, в программном коде можно либо вбивать ширину имлульсов вручную и подбирать точный угол, либо задавать угол в виде градусов при помощи команды библиотеки.
ЧИТАТЬ ДАЛЕЕ: Промежуточное реле назначение принцип действия
• Вариант 1
В данном скетче зададим 3 угла поворота выходного вала сервопривода используя управление изменением непосредственно значения ширины импульса. Данный метод самый точный, однако для каждого угла ширину импульсов придется подбирать индивидуально.
![Драйвер сервоприводов multiservo shield v2 [амперка / вики]](https://kupifonarik.ru/wp-content/uploads/f/d/4/fd4461349a0fa500116d37bf8f7fff25.jpeg)
//Тестировалось на Arduino IDE 1.0.1// добавляем библиотеку для работы с сервоприводами #include {amp}lt;Servo.h{amp}gt; // для дальнейшей работы назовем 9 пин как servoPin #define servoPin 9 // 544 это эталонная длина импульса при котором сервопривод должен принять положение 0° #define servoMinImp 544 // 2400 это эталонная длина импульса при котором сервопривод должен принять положение 180° #define servoMaxImp 2400 Servo myServo; voidsetup() { myServo.attach(servoPin, servoMinImp, servoMaxImp); // устанавливаем пин как вывод управления сервоприводом,// а также для работы сервопривода непосредственно в диапазоне углов от 0 до 180° задаем мин и макс значения импульсов.// импульсы с большей или меньшей длиной восприниматься не будут.// для сервоприводов даже одной партии значения длин импульсов могут отличаться, может быть даже и 584-2440.// поэкспериментируйте и найдите идеальные длины импульсов конкретно для вашего сервопривода. } voidloop() { // устанавливаем качалку сервопривода в положение 0°(т.к.импульс равен 544мкс) myServo.writeMicroseconds(servoMinImp); delay(2000); // в данной функции можно задавать длины импульсов непосредственно числами. // 90°(т.к.vимпульс равен 1520мкс) myServo.writeMicroseconds(1520); delay(2000); // 180°(т.к. импульс равен 2400мкс) myServo.writeMicroseconds(servoMaxImp); delay(2000); }
• Вариант 2
//Тестировалось на Arduino IDE 1.0.1 #include {amp}lt;Servo.h{amp}gt; Servo myservo; voidsetup() { // устанавливаем пин как вывод управления сервой myservo.attach(9); } voidloop() { // устанавливаем угол 0° myservo.write(0); delay(2000); // устанавливаем угол 90° myservo.write(90); delay(2000); // устанавливаем угол 180° myservo.write(180); delay(2000); } myservo.read();Считывает текущий угол поворота сервопривода, возвращает значение типа int — угол от 0 до 180 градусов.
myservo.attached();Проверяем, привязан ли сервопривод. Возвращает логическое значение bool.
myservo.detach();Отключает сервопривод от пина.
• Что такое сервопривод?
• Отличие цифрового сервопривода от аналогового
Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки.
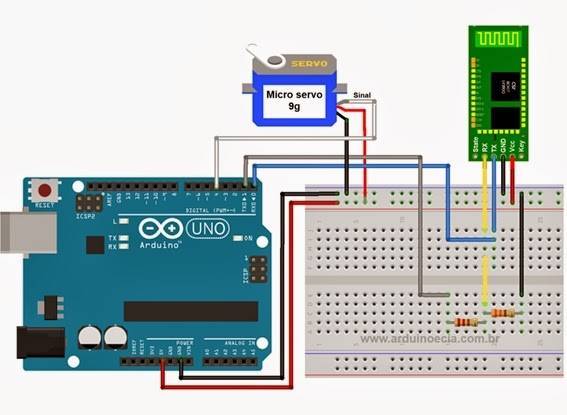
Шаг 2. Принципиальная схема
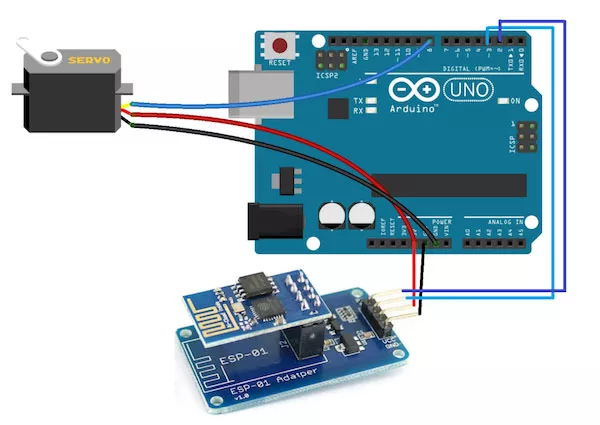
Сначала подключите ESP8266 к Arduino. Мы использовали адаптер для подключения ESP8266 к Arduino, что упростит соединение. Адаптер имеет регулятор от 5 до 3,3 В, и вам не нужно подключать к нему какие-либо внешние резисторы.
- Подключите GND адаптера к GND Arduino
- Подключите VCC адаптера к 5V Arduino
- Подключите RX от адаптера к контакту 2 Arduino
- Подключите вывод TX от адаптера к контакту 3 Arduino
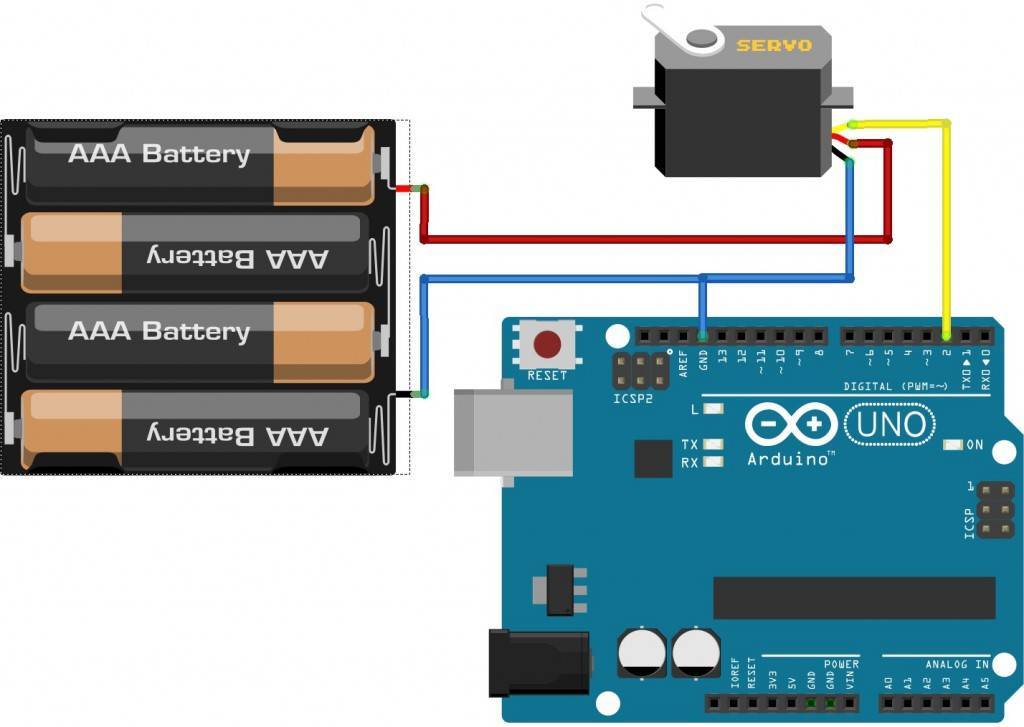
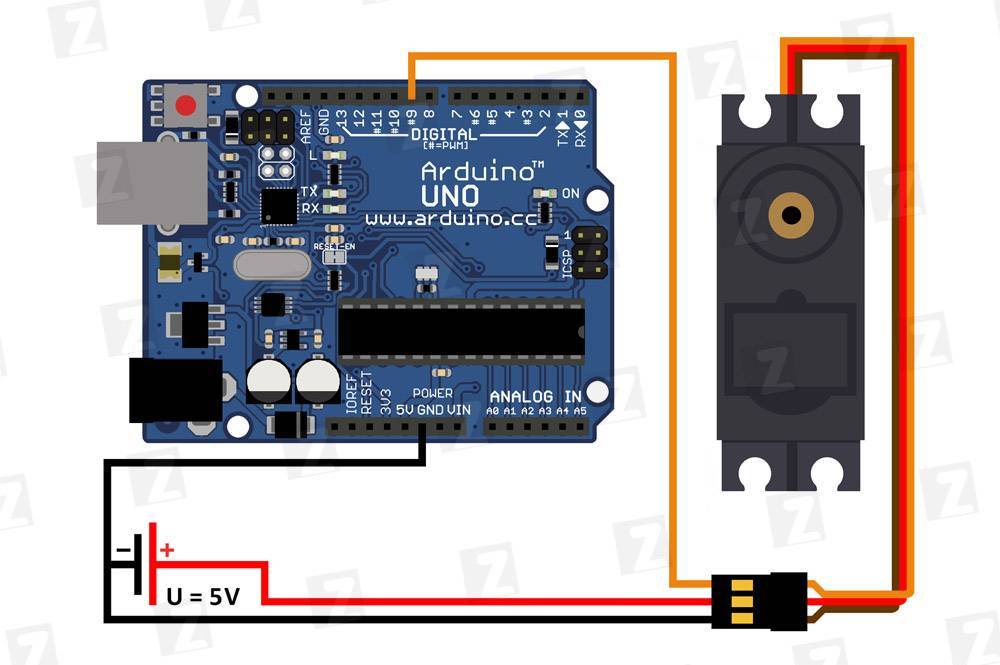
После этого соедините сервомотор с Arduino. Соедините сервомотор с Arduino следующим образом:
- Черный провод серводвигателя к выходу GND Arduino
- Красный провод серводвигателя к выводу 5V Arduino
- Желтый провод серводвигателя на штырь 8 Arduino
Сравнение с шаговым двигателем
Другой вариант точного позиционирования ведомых элементов без датчика обратной связи — использование шагового двигателя. В этом случае схема управления отсчитывает необходимое количество импульсов (шагов) от исходного положения (эта характеристика обусловлена характерным шумом шагового двигателя в 3,5-дюймовых приводах и CD / DVD при повторной попытке его чтения). В этом случае точное позиционирование обеспечивается параметрическими системами с отрицательной обратной связью, которые образуются взаимодействием соответствующих полюсов статора и ротора шагового двигателя.Опорный сигнал для соответствующей параметрической системы генерируется системой управления шаговым двигателем система, которая активирует соответствующий полюс статора.
Поскольку датчик обычно управляет ведомым элементом, электрический сервопривод имеет следующие преимущества перед шаговым двигателем
- не предъявляет особых требований к электродвигателю и коробке передач — они могут быть практически любого желаемого типа и мощности (а шаговые двигатели, как правило, бывают маломощными и тихоходными);
- гарантирует максимальную точность, автоматически компенсируя: механические (люфт в приводе) или электронные неисправности в приводе;
- постепенный износ привода, при этом шаговый двигатель требует для этого периодической регулировки;
- тепловое расширение накопителя (во время работы или сезонное), что стало одной из причин перехода на сервопривод для позиционирования головок в жестких дисках;
- обеспечить немедленное обнаружение неисправности (выхода из строя) привода (механического или электронного);
максимально возможная скорость движения элемента (у шагового двигателя самая низкая максимальная скорость по сравнению с другими типами электродвигателей);
затраты энергии пропорциональны сопротивлению элемента (шаговый двигатель постоянно запитан номинальным напряжением с запасом на возможную перегрузку);
Недостатки по сравнению с шаговым двигателем
- необходимость в дополнительном элементе — датчике;
- блок управления и логика его работы более сложны (требуется обработка результатов датчиков и выбор управляющего воздействия, а в центре контроллера шагового двигателя находится только счетчик);
- проблема фиксации: обычно она решается постоянным торможением подвижного элемента или вала электродвигателя (что приводит к потерям энергии) или использованием червячных / винтовых передач (конструктивное усложнение) (в шаговом двигателе каждый шаг задается сам мотор).
- сервоприводы обычно дороже, чем шаговые.
Однако возможно использование сервопривода на базе шагового двигателя или в дополнение к нему, в некоторой степени объединив их преимущества и исключив конкуренцию друг с другом (сервопривод выполняет грубое позиционирование в зоне покрытия соответствующая система шагового двигателя, причем последний выполняет окончательное позиционирование с относительно большим крутящим моментом и фиксирует положение).
В сервоприводе нет проблем с ремонтом, в отличие от шагового. Высокоточное позиционирование и поддержание в заданном положении обеспечивается работой электрической машины в клапанном режиме, суть которого сводится к ее работе в качестве источника энергии. В зависимости от несовпадения положения (и других координат электропривода) формируется силовая задача. При этом несомненным плюсом сервопривода является энергоэффективность — ток подается только в том объеме, который необходим для удержания рабочего органа в определенном положении. В отличие от пошагового режима, когда применяется максимальное значение тока, определяющее угловую характеристику станка. Угловая характеристика станка аналогична небольшим отклонениям механической пружины, которая пытается «подтянуть» рабочий орган в нужную точку. В шаговом приводе чем больше смещение положения, тем больше сила при постоянном токе.





