Управление
В этой части мы рассмотрим как новые и старые методы запуска, регулирования и останова электрических двигателей. Старые методы это примитивное кнопочное управление через магнитные пускатели. Новые методы это питание через софт стартеры и связку выпрямитель-инвертор.
Регулирование частоты вращения асинхронных двигателей
Существует несколько способов регулирования частоты вращения ротора. Самые известные из них это введение активного сопротивления в схему ротора (способ описанный выше) и второй это частотное регулирование.
Для этого стандартное промышленное электропитание выпрямляется до постоянного напряжения 380* √2=536 вольт. Для сглаживания пульсаций служит расположенный посредине схемы конденсатор.
Но самое главное, далее выпрямленное напряжение, превращается в переменное напряжение управляемой частоты и амплитуды. Это происходит с помощью трехфазной схемы из шести транзисторов или тиристоров, каждый из которых отвечает за свою полуволну.
Подключение с помощью нереверсивной схемы
Рассмотрим подключение асинхронного двигателя к трехфазной сети. Вся схема делится на две основных части, это силовая часть, расположенная слева и линии управления, расположенные справа. Кроме того, силовая часть на чертеже прерывается тремя размыкателями.
Рассмотрим их сверху вниз. Первое устройство, с обозначением QF, это автоматический трехфазный выключатель. Второе устройство, с обозначением КМ, это силовые контакты магнитного пускателя. Третье устройство, с обозначением КК, это силовые контакты теплового реле.Поскольку во вспомогательной части имеются кнопки «Стоп» и «Пуск», при нажатии которых напряжение подается на катушку магнитного пускателя. Она подключает электродвигатель к сети трехфазного напряжения.
Более того, линия , после катушки магнитного пускателя может обрываться управляющим сигналом от теплового реле. Тепловое реле срабатывает при превышении допустимого тока через него.
Подключение с помощью реверсивной схемы
На рисунке отображена схема управления, позволяющая электродвигателю работать в двух разных направлениях. Эта схема меняет две фазы из трех между собой. По причине того, что сменяется последовательность направляющих усилий каждой фазы. Кроме того меняется суммарное направление вращение магнитного поля.
Управление реализовано с помощью двух контакторов, каждый из которых подключает к трехфазному питанию свою последовательность фаз.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
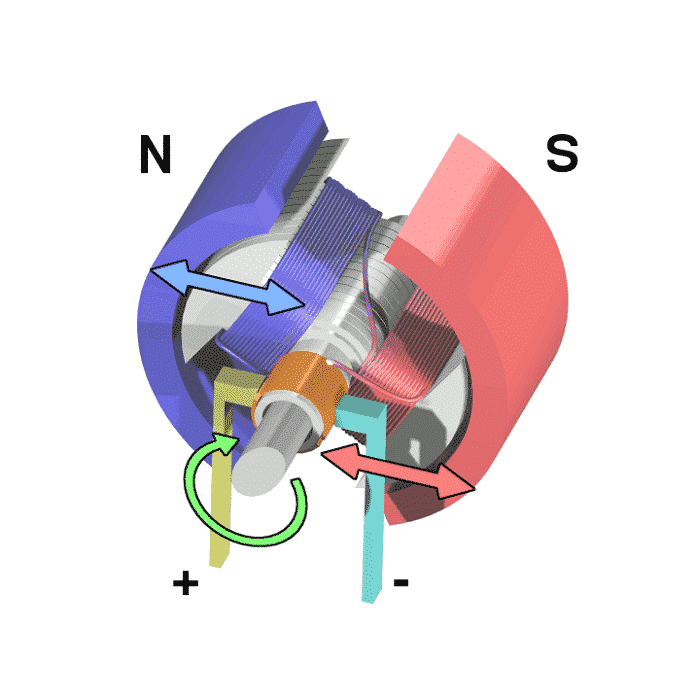
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока. Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
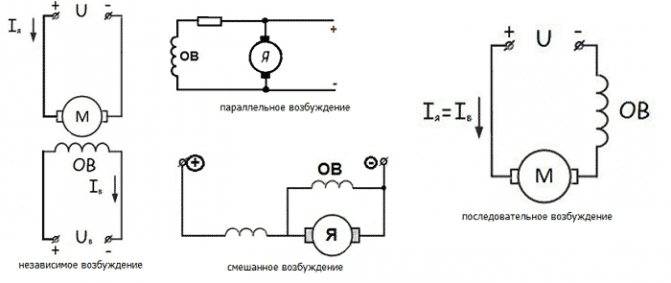
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.

Рисунок 3. Ротор с тремя обмотками

Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
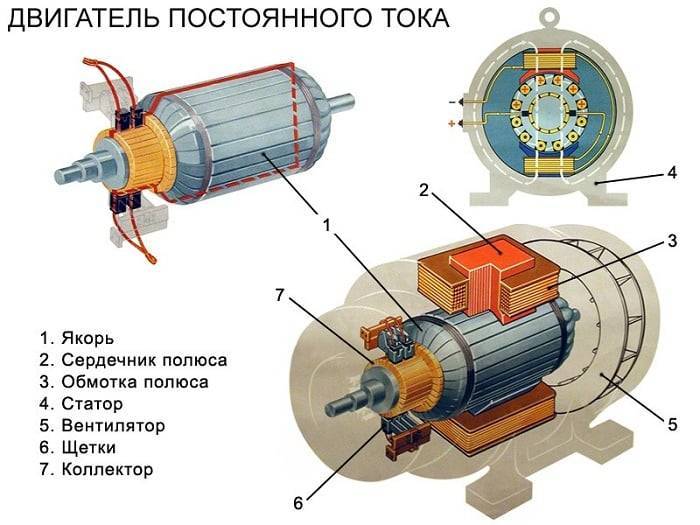
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
Как определить пусковую обмотку двигателя стиральной машины
Для начала найдем парные вывода их должно быть две пары, как это сделать. Сейчас для этих целей множество приборов тестеры, омметры и т.п. Берем любой вывод обмотки и подключаем к нему любой из двух щупов прибора, а вторым щупом ищем ему пару.
Если прибор показал вам какое-то значение, например сопротивление 11 Ом то это и есть второй вывод обмотки, запишем показания прибора, отмечаем пару.
Следовательно, оставшиеся два вывода будут второй парой, но нам необходимо определить какая из них пусковая и рабочая обмотка, делаем замер, прибор показал 30 Ом. Теперь ясно, где пусковая и рабочая обмотка, у пусковой обмотки сопротивление должно быть больше, чем у рабочей обмотки.
На рисунке изображено: ОВ
– рабочая, обмотка возбуждения, основного вращающего магнитного поля.
ПО
– пусковая обмотка необходима для создания начального крутящегося момента в определенном направлении.SB — кнопка для кратковременного включения пусковой обмотки к сети 220В.
Для того чтобы изменить направление вращение вала двигателя достаточно поменять вывода пусковой обмотки местами и направление при запуске изменится.
Во время экспериментов с двигателем не забудьте закрепить его, чтобы он во время пуска не ускакал и не собрал все провода в кучу.
Реле времени задает временной режим с выдержкой на отключение электродвигателя. Токовое реле служит для запуска двигателя, для кратковременного включения пусковой обмотки к сети 220В.
Реле выполнено в пластиковом корпусе, имеется три контактных вывода X1, X2, X3. На крышке показана правильная установка реле, большая стрелка с надписью «верх», реле должно располагаться так чтобы стрелка всегда указывала вверх.




Для чего это необходимо, вы поймете, если поспорите устройство и принцип работы реле.
Подключение реле:
Подаем напряжение 220В на вывод «Х3» токового реле, фазу или ноль без разницы, а второй сетевой провод 220В напрямую подключаем к рабочей обмотке двигателя.
Вывод «Х1» — «ОВ» подключается ко второму свободному выводу, рабочей обмотке. Вывод «Х2» — «ПО» подключается к выводу пусковой обмотке.
При запуске двигателя, пусковой ток больше, чем рабочий. При прохождении пускового тока через катушку — токового реле в катушке наводится магнитное поле, которое втягивает — подвижный стальной сердечник, он приподнимается и поднимает подвижный контакт — .
Замыкается электрическая цепочка, которая подключает пусковую обмотку электродвигателя. Двигатель запускается и развивает номинальные обороты.
Поскольку двигатель вошел в рабочий режим ток в реле уменьшился, ослабло магнитное поле в катушке реле, которое удерживало стальной сердечник – в верхнем положении. Сердечник под своим весом падает в низ и тянет за собой — контакт, пусковая обмотка — ПО
отключается от сети 220В.
Витки из нихрома — выполняют тепловую защиту двигателя. При перегрузе, заклинивание или междувиткового замыкания обмоток двигателя, нихром разогревается и своим теплом подогревает — биметаллическую пластину, она при нагревании деформируется, прогибается и размыкает контакт — , отключает двигатель от сети 220В на время остывания биметаллической пластинки.
После остывания пластины контакт снова замкнется, и реле будет пытаться снова включить двигатель.
На рисунке приведен пример, схема запуска двигателя от стиральной машины при помощи конденсатора.
Заключение
, для полной уверенности, что все сделали правильно, внимательно проверяем монтаж собранной схемы и тестируем ее, включаем двигатель на 1 мин. отключаем от сети и проверяем нагрев двигателя.
Почему через минуту, для того, чтобы определить в каком именно месте начинает, греется двигатель в подшипниках или в статоре. Если подождать дольше, то тепло распределится по корпусу и будет не понятен очаг перегрева.
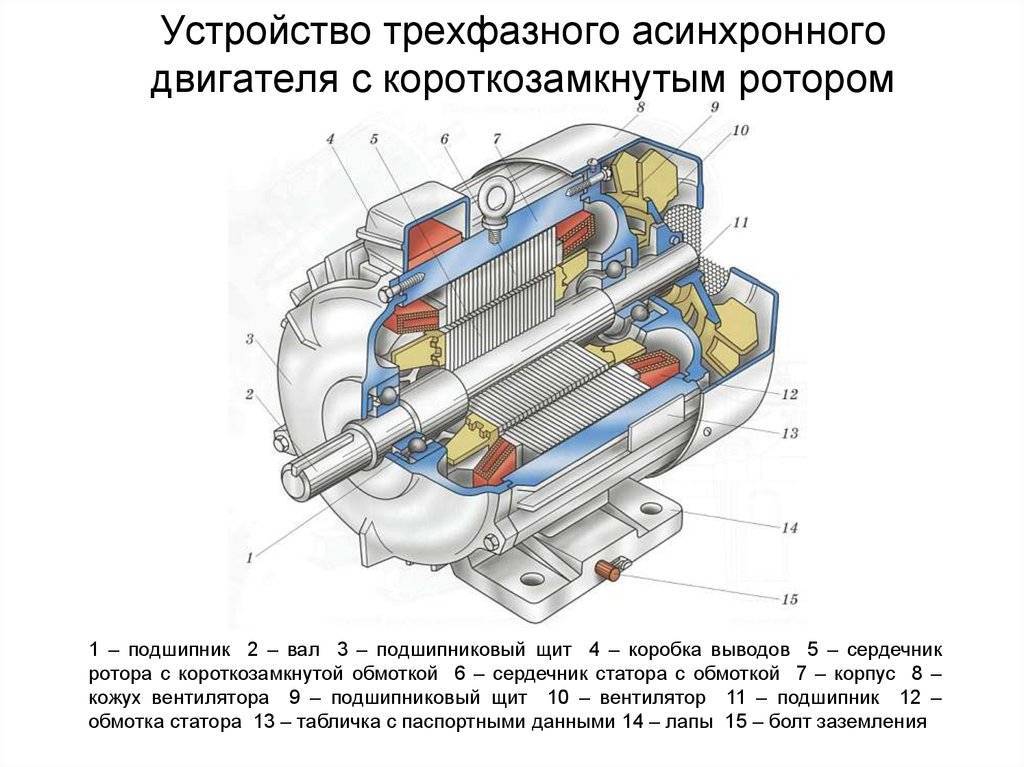
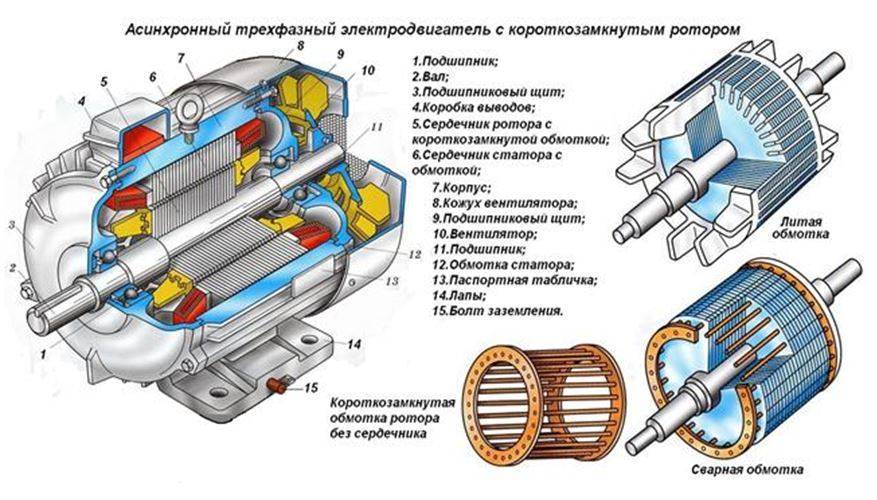
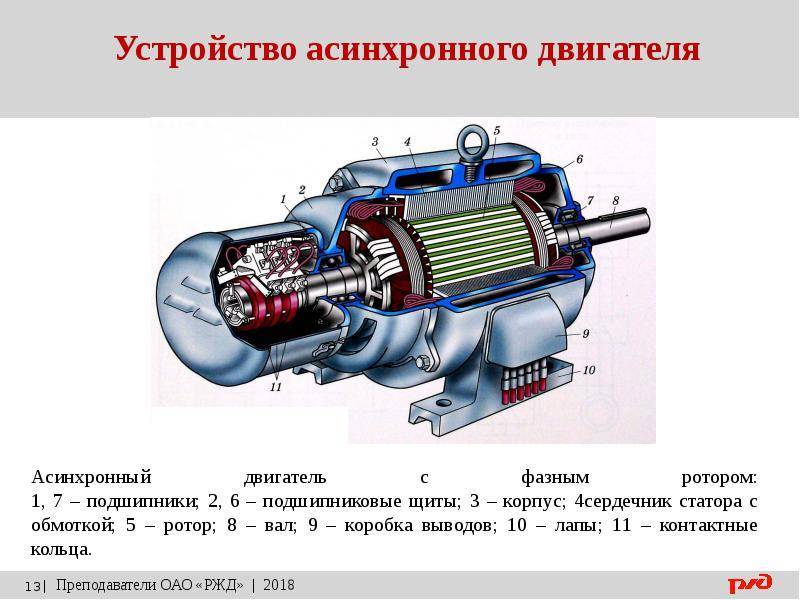
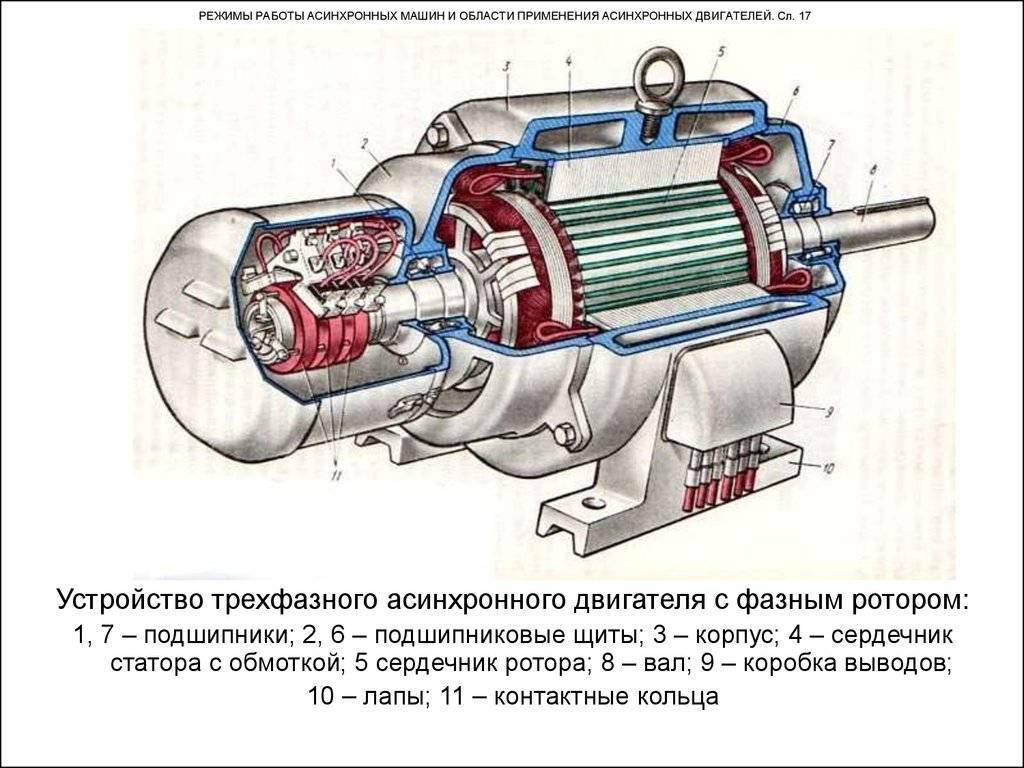
Устройство фазного ротора
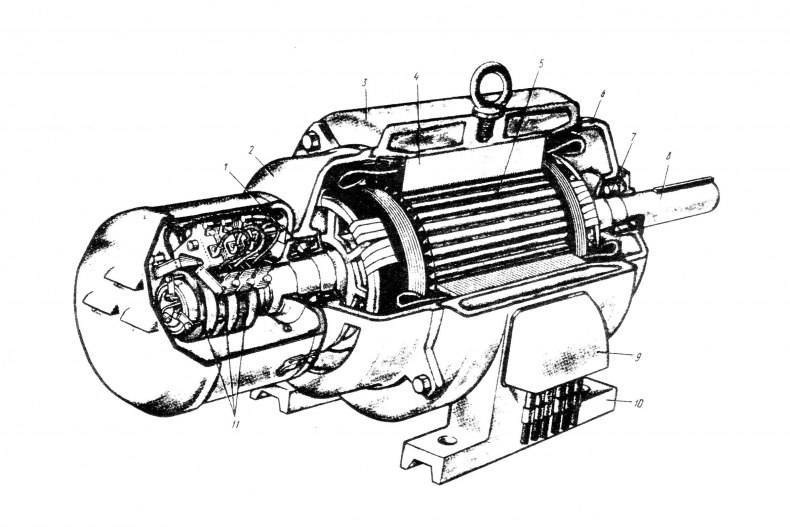
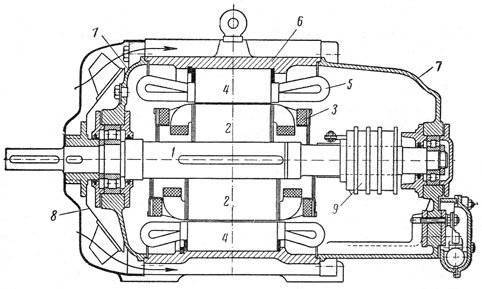 Разрез асинхронного двигателя с фазным ротором. Рисунок 4 1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Разрез асинхронного двигателя с фазным ротором. Рисунок 4 1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
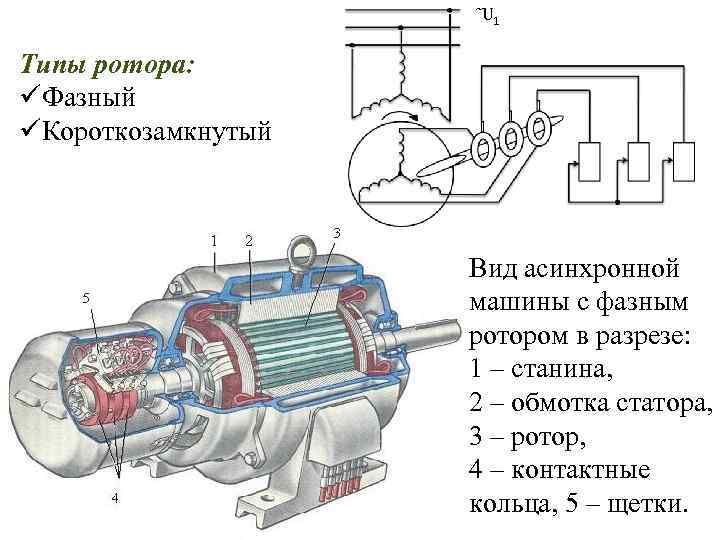
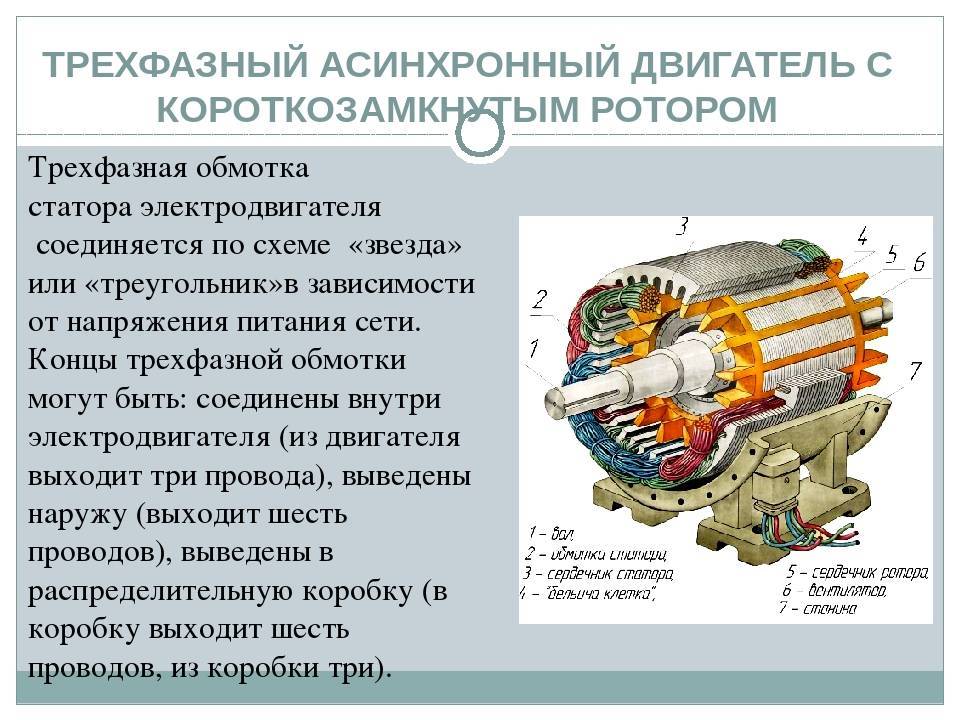
Фазный ротор характерен наличием трех фазных обмоток. Они, зачастую, соединяются по схеме звезды (иногда по схеме треугольника). Каждый конец фазной обмотки присоединен к медному кольцу. Кольца же укрепляются на валу и изолируются. Это дало двигателю еще одно название: асинхронный электродвигатель с контактными кольцами. Всего кольца три. Их плотно насаживают на вал с помощью изоляционных прокладок. На кольца наложены щетки (они расположены в щеткодержателе, в свою очередь укрепленных на крышке подшипника).
Щетки всегда имеют исправный электроконтакт с кольцами. Это соединяет их с самой обмотками якоря. Между собой щетки соединяет трехфазный реостат.
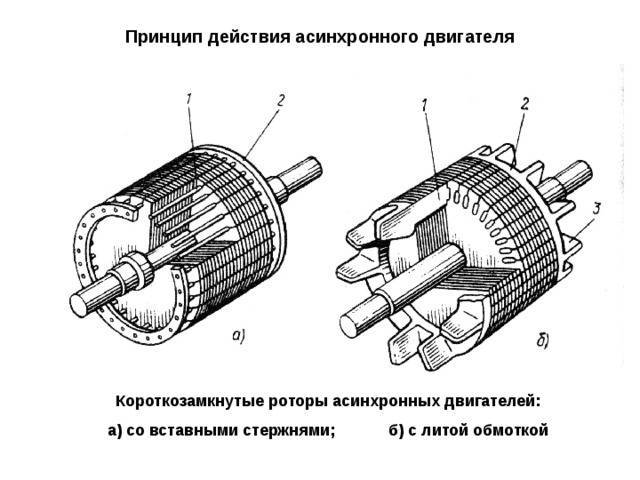
Принцип работы асинхронной машины
Все асинхронные двигатели работают по принципу вращающегося магнитного поля. Но как создать такое поле? Самый простой способ – вращать постоянный магнит по оси. Можно взять медный диск и крутить магнит уже вокруг него. Если магнит достаточно силен, то медный диск тоже начнет вращаться, как бы пытаясь угнаться за магнитом. Будет создаваться ощущение, что между двумя предметами есть некая связь которая постоянно их удерживает. Движение магнита и диска будет не синхронным, ведь последний всегда будет отставать в «погоне».
Объяснение этому явлению можно дать такое: вращаясь вокруг диска, магнит способен возбудить в нем токи Фуко (индукционные). Их траектория – замкнутый круг. Индукционные токи не имеют начала и конца. Их можно назвать токами короткого замыкания, разогревающими металл. Как правило, от них нужно избавляться, но в этом случае именно они и являются причиной появления магнитного поля в диске. Далее это поле начинает взаимодействие уже с полем самого постоянного магнита.
Асинхронные электромоторы работают по такому же принципу, но вращающееся поле создает не магнит, а обмотка статора. В ней, собственно, и создается подходящее для вращения поле.
Подобные условия возможно создать только в системе с несколькими фазами, где ток сдвигается на несколько градусов. В бытовых электроприборах двигатели обычно с двумя фазами, причем вторую создают искусственно. Для этого используют сдвигающий конденсатор, катушку или сопротивление. Электродвигатели, используемые на промышленных предприятиях, выпускают с тремя фазами.
В самом первом трехфазном асинхронном электродвигателе было три обмотки. Они были удалены друг от друга на 120 градусов. Схема работы такого двигателя и синусоидальный ток трех его полюсов показан на рисунке 4.
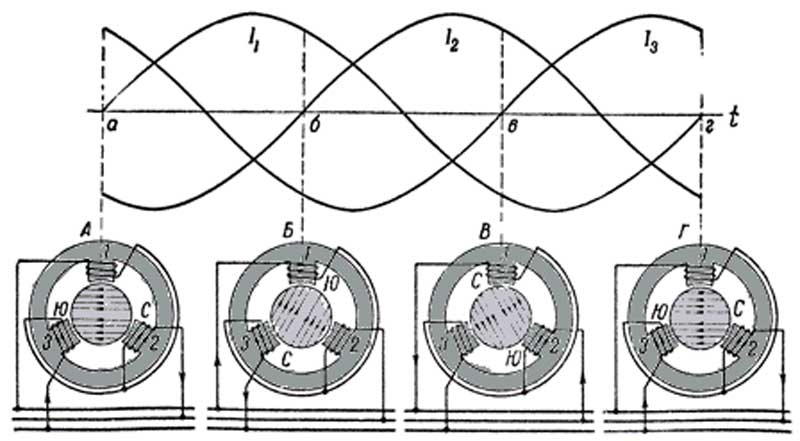 Рисунок 4
Рисунок 4
Итак, в тот момент, когда в одной из фаз ток нулевой, в остальных он принимает максимальные значения, при этом фазы отличаются по направлению тока. Таким образом и создается магнитное поле между двумя из трех обмоток. Далее все тут же меняется: один полюс отключается, а другой, тот что остался работать, начинает менять полярность. Это происходит из-за изменения направления тока в обмотке. А тот полюс, что только перешел в рабочее состояние, поддержит смещение поля. Благодаря этому в якоре машины формируются вихревые токи (так как линии магнитного поля пересекают часть ротора). Токи входят во взаимодействие с полем статора, которое уже вращается, пытаются его как бы догнать. Происходит поворот ротора.
Такой принцип работы асинхронной машины, который был выведен еще в XIX веке, актуален и для тех электромоторов, что производят сегодня. Однако, изменения в конструкции все же произошли. Дисковые и цилиндровые якори теперь заменили на «беличьи клетки», чаще используют роторы фазного типа. Форма обмотки статичной части двигателя тоже подверглась изменениям. Вместо катушки с полюсным наконечником используют радиальные обмотки: их укладывают в пазы.
Стоит также упомянуть о том, что такое схема замещения асинхронного двигателя. Ее часто используют в электротехнике во время проведения расчетов. Вместо самого электродвигателя подставляют эквивалентную схему, где электромагнитную связь замещает электрическая.
Как подключить электродвигатель к сети
Питающее напряжение у разных потребителей разное, из-за этого время от времени электрическое оборудование приходится переподключать. Предложенная ниже инструкция поможет безопасно подключить электродвигатель на 220 В.
Задача достаточно проста. Главное в этом деле – не ошибиться при подключении обмоток. Классификация двигателей включает в себя два типа:
- трехфазного с обмоткой (схема включения звезда или треугольник);
- однофазного (у него пусковая обмотка).
Их способы подключения мы и рассмотрим.
Пусковой процесс поэтапно
Для лучшего понимания процесса, пуск асинхронного двигателя с фазным ротором можно разделить на несколько ключевых этапов:
- работа асинхронного мотора начинается с постепенного и равномерного раскручивания вала, при котором происходит уравновешивание момента сил сопротивления;
- во время преодоления приложенного к ротору тормозного момента, компенсации потерь и передачи подвижным элементам конструкции кинетической энергии потребление ресурсов источника питания сильно возрастает;
- на данном этапе начальная величина пускового момента и характеристики скольжения напрямую связаны с активным сопротивлением, создаваемым резисторами методом последовательного включения их в роторную цепь;
- сопротивление пусковых резисторов снижает токовые показатели электроустановки, но пропорционально увеличивает до максимального значения пусковой момент;
- для уменьшения пускового момента на старте в обязательном порядке применяется методика увеличения резистивного сопротивления, что также способствует ограничению области скольжения и снижению риска достижения ею недопустимых величин, плохо влияющих на разгон электромотора;
- далее для поддержки полученного при разгоне ротора крутящего момента, сокращения времени старта и защиты агрегата от перегрева необходимо постепенно понижать сопротивление пусковых резисторов;
- разные по своим характеристикам резисторы переключаются с помощью контакторов ускорения, последовательно включенных в схему;
- чтобы обмотка фазного ротора не получила избыточное напряжение, отключать электроустановку от питающей сети можно только при замыкании накоротко роторной электроцепи.
Если при выключении рассматриваемого силового агрегата роторную цепь не замкнуть, то может возникнуть трехкратное, а то и четырехкратное напряжение по сравнению с номиналом.
Виды двигателей постоянного тока
К концу 19 века уже началась эксплуатация электрических машин постоянного тока: генераторов и моторов. Причем оба вида не отличаются конструктивно и могли применяться как для выработки электроэнергии, так и для производства работ.
Коллекторный мотор
Принцип вращения рамки с током в поле постоянного магнита наиболее ярко реализован в коллекторных электродвигателях. Такие электродвигатели работают как от постоянного, так и от переменного тока. Впервые судно с двигателем постоянного тока запустил Б.С. Якоби по реке Неве в 1838г.
Такой двигатель состоит из неподвижной части (статор), на которой устанавливаются магниты для маломощных двигателей или катушки из ферримагнитных сталей, и обмотки с медным проводом для мощных электрических машин.
Якорь МПТ собран из пластин электротехнической стали, изолированных от вала и друг от друга для уменьшения вихревых токов. В пазы цилиндра укладывается витки провода из меди разного сечения в зависимости от токов и выбранной схемы (петлевая, волновая). Концы проводов выводятся и ввариваются (впаиваются) в ламели коллектора.
Коллектор состоит из медных изолированных пластин (ламелей) закрепленных по окружности, изолированных друг от друга и корпуса якоря. По ним перемещаются притертые подпружиненные щетки, закрепленные в щеткодержателе, для последовательной подачи тока в обмотки якоря. При подаче напряжения на щетки, якорь начинает вращаться и двигатель постоянного тока выходит в заданный режим.
Универсальный коллекторный мотор
Дальнейшее развитие коллекторных ДПТ позволило использовать их при работе от источников переменного тока. Для этого шихтуется не только якорь, но и цилиндр статора набирается из пластин электротехнической стали, а обмотки возбуждения соединяются последовательно с якорными. Одновременная смена полярности на них при прохождении переменного тока не меняет направление вращения вала двигателей.






Основное отличие — шихтованные статор и якорь делают магнитный поток стабильным и не создают вихревых токов (меньше греются). В остальном универсальный двигатель мало чем отличается от обычного коллекторного.
Вентильно-индукторные двигатели
Такие электромоторы иногда называются бесщёточными или безколлекторными. Суть такой конструкции в том, что ротор имеет зубчатое строение, собранное из постоянных магнитов, а обмотки возбуждения размещаются на зубчатых полюсах статора.
Переключением полюсов (катушек) занимается встроенный контроллер, за обратную связь, контролирующую положение якоря (ротора), отвечает датчик Холла. При включении пары катушек магнит на роторе движется к ней, затем следующая пара получает питание. Скорость вращения определяется частотой переключения катушек — чем выше частота, тем выше скорость.
Недостатком такой конструкции является пульсирующий крутящий момент. Плюсы: нет коллектора и щеток, простая конструкция, хорошее управление скоростью и малые габариты.
Безколлекторный с независимым возбуждением
Конструкция ротора этого двигателя собрана из двух зубчатых пакетов из магнитной стали на общей оси. Вершины зубцов пакета смещены друг относительно друга на 120°. Пакеты отстоят друг от друга на расстоянии, а зубцы одного совпадают с впадинами другого, таким образом, что суммарный магнитный поток ротора равен нулю.
Размещенная на статоре обмотка возбуждения тоже распределена со смещением в 120°. Собранный из электротехнической стали статор имеет размер такой, чтобы его магнитное поле перекрывало оба пакета магнитов ротора.
Поочередное включение катушек ротора создает магнитное поле в обоих магнитных блоках и ротор начинает плавно вращаться. Изменяя частоту и направление переключения секций обмотки возбуждения, а также силу тока в них, можно получить бесконтактный реверс, линейный крутящий момент и плавное изменение скорости.
Кроме этих достоинств есть еще отсутствие магнитов и графитовых щеток с коллектором. К недостаткам можно отнести сложность конструкции двигателей и питание обмоток от электронного преобразователя.
Несомненными достоинствами двигателей постоянного тока можно отнести:
- уровень плавного регулирования скорости достигает 10000 об/мин;
- легкость управления скоростью за счет напряжения, а крутящего момента — током якоря;
- за счет обратной связи можно поддерживать хороший момент на малых оборотах.
Их недостатков можно отметить обязательное наличие преобразователя переменного тока в постоянный и сложность конструкции некоторых видов двигателей (коллектор со щетками, сложный якорь).
Плюсы и минусы
В последнее время асинхронные агрегаты пользуются большой популярностью. Она связана с массой преимуществ, которыми они обладают. В их числе:
- Высокие значения при начальном вращающем моменте.
- Способность принимать любые механические перегрузки без существенного изменения КПД или нарушения стабильной работы установки. Даже если в системе возникают разнообразные перегрузки, агрегат продолжает функционировать с заданной скоростью и практически не отклоняется от базового режима.
- Сниженный пусковой ток. В отличие от других асинхронных моделей, например, с короткозамкнутым ротором, у этих двигателей сравнительно низкие показатели пускового тока.
- Возможность полной автоматизации работы.
- Простота конструкции.
- Простая схема запуска.
- Сравнительно невысокая цена.
- Отсутствие необходимости сложного и дорогостоящего обслуживания.
По последнему показателю устройства с короткозамкнутым ротором более продуктивные.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин-1
Начальный пусковой момент – момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение – значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями – в виде тепла в результате нагрева проводников с током;
магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.








где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m – масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.





