Шаговый двигатель – принцип работы
Шаговый двигатель — это двигатель, который перемещает свой вал в соответствии с шагами и направлением, указанными в программе микроконтроллера. Такие устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и других электронных устройствах. Большим преимуществом шаговых двигателей перед двигателями постоянного вращения является то, что они обеспечивают точное угловое позиционирование ротора. Кроме того, шаговые двигатели имеют возможность быстро запускаться, останавливаться, реверсировать.
Шаговый двигатель вращает ротор на заданный угол с соответствующим управляющим сигналом. Благодаря этому есть возможность проверить положение узлов механизмов и перейти в указанное место. Мотор работает следующим образом: в центральном валу расположен ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое действует на магниты и заставляет вал вращаться. Такие параметры, как угол поворота (шаги), направление движения задаются в программе для микроконтроллера.
Основные типы шаговых двигателей:
- Двигатели с регулируемыми магнитами (используются редко);
- Двигатели с постоянными магнитами;
- Гибридные двигатели (сложнее в производстве, дороже, но наиболее распространенный тип шаговых двигателей).
Назначение элементов и контактов на плате драйвера L298N
Посмотрим внимательнее на модуль и разберемся с его контактами.

Логика микросхемы L298N питается напряжением 5 Вольт. Для этого на модуле предусмотрен стабилизатор напряжения 78M05. На вход этого стабилизатора можно подавать напряжение до 35 В, а на выходе всегда получается 5 В. Рабочий ток у 78M05 небольшой — до 500 мА. Однако, при желании, от него можно питать и саму плату Ардуино Уно, к которой мы будем подключать драйвер.
Тройная клемма снизу отвечает за питание модуля. Самый левый контакт — питание моторов. Сюда можно подавать до 35 В. Средний контакт — земля, которая должна быть общей для модуля и контроллера. Правый контакт имеет двоякую функцию. Если на модуле стоит перемычка питания стабилизатора, то на этом контакте будет +5В и к нему можно ничего не подключать, либо питать от него контроллер. Но если перемычку убрать, то к этому контакту нужно будет непременно подключить +5В от контроллера, чтобы питать драйвер. В нашем примере мы будем ориентироваться именно на вариант без перемычки.
Две другие винтовые клеммы (OUT1/2 и OUT 3/4) служат для подключения моторов. Надо отметить, что моторы постоянного тока неполярные, но от того на какой контакт мотора подается плюс, а на какой минус, зависит направление их вращения.
Наконец, осталось разобраться с контактами управления. Их по три штуки на каждый мотор. Контакты ENA и ENB позволяют управлять моторами с помощью ШИМ сигнала. Если ENA и ENB подключить строго к +5 В, то моторы будут всегда вращаться с максимальной возможной скоростью. Именно для этого режима на модуле предусмотрены две перемычки рядом с ENA и ENB.
С помощью контактов IN1,IN2,IN3,IN4 задаётся режим работы моторов. Таблица режимов для двигателя A имеет вид:
| Режим | IN1 | IN2 |
| Вращение в одну сторону | 1 | |
| Вращение в обратную сторону | 1 | |
| Блокировка мотора | 1 | 1 |
| Отключение мотора |
Тут следует пояснить последние два режима. Если нам необходимо резко остановить мотор, то выбираем режим блокировки. Для плавной остановки — выбираем «отключение мотора»
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
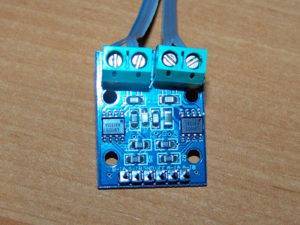
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| Остановка | ||
| 1 | Двигается вперед | |
| 1 | Двигается назад | |
| 1 | 1 | Отключение |
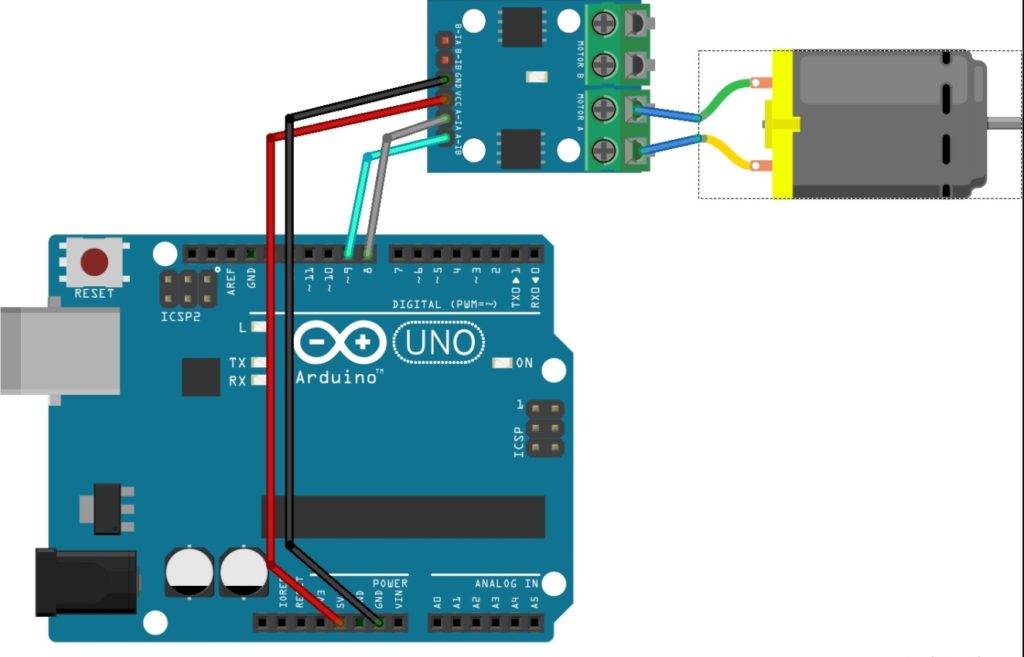
Подключение одного двигателя к Ардуино изображено на рисунке.
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Что такое шаговый двигатель?
Прежде чем перейти к статье, давайте сразу договоримся, что статья не направлена на специалистов, а её цель – донести любознательным любителям техники и технологий о таком устройстве, как шаговый двигатель и об основах работы с ними. Поэтому умников и критиков, жаждущих поговорить о великом многообразии управляемого и регулируемого электропривода, прошу идти общаться на тематические ресурсы по ЧПУ-станкам и 3D-принтерам.
Итак, для начала сформулируем определение. Согласно Википедии: «Шаговый электродвигатель — синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора».
Формулировка достаточно понятна, но её последнее предложение может вызвать некоторое недопонимание. Поэтому я предлагаю провести небольшое сравнение.
Всем известно что ротор «обычного» электродвигателя, будь то асинхронного, синхронного, коллекторного или любого другого будет вращаться до тех пор, пока на него подают напряжение питания, и после отключения питания он будет вращаться еще какое-то время по инерции, если же не используются какие-либо средства для его торможения.
Ротор такого двигателя вращается просто вокруг своей оси без каких-либо ограничений, на 360 градусов, и остановится он в любом месте. Зафиксировать его положением можно только механически (тормозом). По этой причине не получится добиться точного позиционирования исполнительных механизмов, что требуется в робототехнике, ЧПУ-станках и другом автоматизированном оборудовании.
Но шаговые двигатели разработаны для применения в механизмах, где детали поворачиваются точно на требуемый угол.
В приведенном выше определении было сказано «…вызывает дискретные угловые перемещения (шаги) ротора…» — это значит, что ротор шагового двигателя не вращается в обычном понимании, а поворачивается на какой-то определенный, «дискретный» угол. Этот угол называется шагом, отсюда и название «шаговый двигатель». Мне нравится еще одно название этих устройств — «двигатель с конечным числом положений ротора».
Питание такого двигателя невозможно без системы управления, или как его еще называют, драйвера — он подаёт импульсы в нужные обмотки, чтобы повернуть ротор на нужный угол. Это наглядно иллюстрирует приведенная ниже анимация.
Кроме того, что можно поворачивать двигатель на определенный угол и фиксировать его в этом положении, делать это всё можно без схемы обратной связи (датчиков положения и прочего).
Рассматривать типы шаговых двигателей в пределах этой статьи мы не будем, лишь кратко перечислим, какими они бывают. По конструкции:
- Реактивные.
- С постоянными магнитами.
- Гибридные.
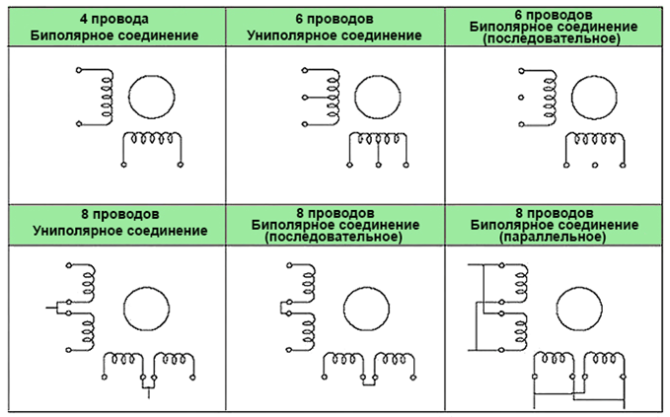
По способу питания:
- Униполярные (однополярные — ток пропускают через обмотки только в одну сторону).
- Биполярные (ток пропускают через обмотки в обе стороны). Здесь драйвер должен подавать напряжение различной полярности, что несколько усложняет схемотехнику. При тех же размерах развивают бОльшую мощность по сравнению с униполярными.
В униполярном двигателе зачастую 5 проводов — 1 общий, от середины каждой из двух обмоток, и 4 от концов обмоток. Иногда говорят «4 обмотки» – это также правильно, поскольку фактически мы получаем 4 обмотки соединенных в общей точки.
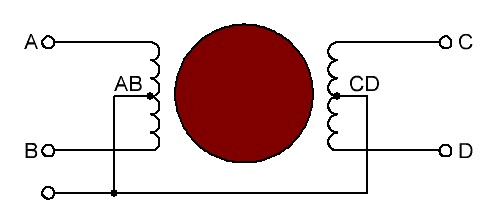
Также ШД могут отличаться и по количеству проводов, это зависит от того, как соединены обмотки и какое питание предполагается, некоторые варианты вы видите в таблице ниже.
Управление шаговым двигателем
Различают два способа управления шаговым двигателем:
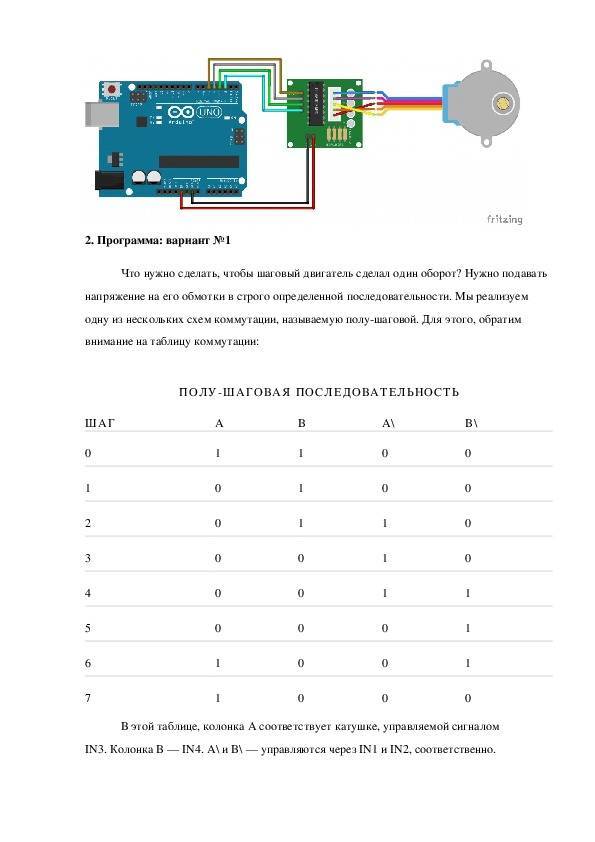
- Полношаговое. Одновременно включается только пара обмоток (без перекрытия с другими). Достигается максимальный момент на валу, но точность установления угла меньше, чем в других способах.
- Полушаговое. В этом случае увеличивается количество шагов, соответственно повышается точность установки положения вала. На каждый первый шаг включается одна обмотка, на каждый второй шагами (полушаг) – пара обмоток. Но когда включена одна обмотка момент на валу снижается вдвое.
На анимациях ниже наглядно продемонстрировано
Полношаговое управление
Полушаговое управление
В некоторых источниках отдельно обозначают микрошаговое управление. Используется, когда необходимо максимальное количество шагов и точность управления. По способу управления оно похоже на полушаговый режим, между шагами включаются две обмотки, а отличие в том, что токи в них распределяются не равномерно. Главный недостаток такого подхода — усложняется коммутация (система управления).
Процесс подключения
Сборка схемы несложная, поэтому доступна любителю. Требуются базовые знания в области электротехники, умение работать с ПК на уровне пользователя и тщательное составление чертежей. Макетная плата позволит вам обойтись без паяльника, пайки и канифоли.
Что понадобится
Для сборки схемы понадобятся следующие компоненты:
- Шаговый двигатель коллектора.
- Плата Arduino. Для новичков подойдет модель UNO.
- Блюдо для хлеба.
- Диоды, транзисторы, резисторы, потенциометр.
- Перемычки и провода.
- «Motor Shield» — дополнительная плата расширения для управления двигателем постоянного тока, а также регулятор скорости.
- Вместо Motor Shield можно использовать драйверы L298N, ULN2003 или L293D.
- Источник постоянного тока.
- USB-кабель для подключения к компьютеру и загрузки эскизов.
Пошаговая инструкция
Драйвер и плата «Arduino» могут выйти из строя при неправильном питании, поэтому сначала необходимо подключить отрицательный провод. Выполнять действия нужно в такой последовательности:
- Подготовьте эскиз для проверки двигателя.
- Поместите щит управления двигателем или драйвер на верхнюю часть платы Arduino UNO.
- Проверьте и при необходимости установите перемычки на плате расширения следующим образом: H1 подключается к контакту 4, E1 — к контакту 5, E2 — к контакту 6 и H2 — к контакту 7. Контакты 5 и 6 должны поддерживать ШИМ (широтно-импульсную модуляцию).
- Подготовьте устройство для подачи постоянного тока на экран.
- Подайте постоянный ток на контакты «+» и «-» платы расширения.
- Подключите питание двигателя к контактам PWR на плате расширения.
- Подключите «Ардуино» с помощью USB-кабеля к ПК и загрузите скетч.
Эскизы можно писать с помощью библиотеки Stepper.h или AccelStepper.h. Плата Arduino UNO подходит для работы с ШИМ. В этом случае в блоке цикла используются команды analogWrite и analogRead.

1Что такое драйвер двигателей и для чего он нужен
Максимальный ток на выводах Arduino слаб (около 50 мА) для такой мощной нагрузки как электромотор (десятки и сотни миллиампер). Поэтому напрямую к выводам Arduino подключать электродвигатель нельзя: есть риск сжечь вывод, к которому подключён двигатель. Для безопасного подключения электродвигателей разных типов к Arduino необходим самодельный или промышленно изготовленный т.н. драйвер двигателей. Драйверы двигателей бывают разные, для их работы часто используются микросхемы типа HG788, L9110S, L293D, L298N и другие. Драйверы двигателей имеют выводы подачи питания, выводы для подключения электродвигателей, а также управляющие выводы.
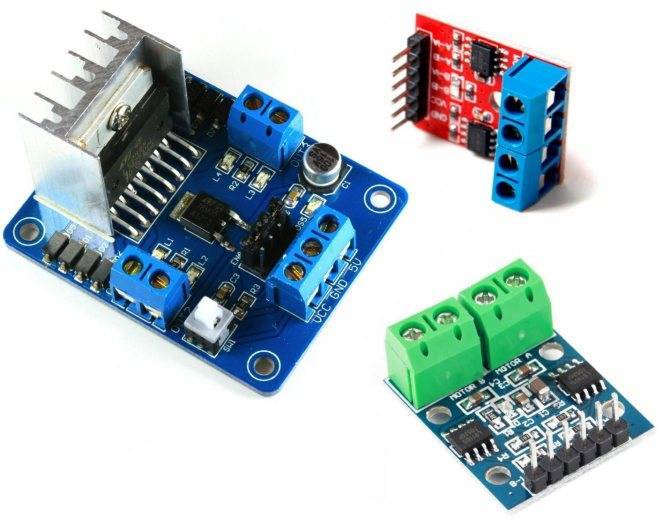
Различные варианты исполнения драйверов двигателей
В данной статье мы будем использовать драйвер для управления двигателями, сделанный на основе микросхемы L9110S. Обычно выпускаются платы, которые поддерживают подключение нескольких двигателей. Но для демонстрации мы обойдёмся одним.
БИБЛИОТЕКА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ ARDUINO
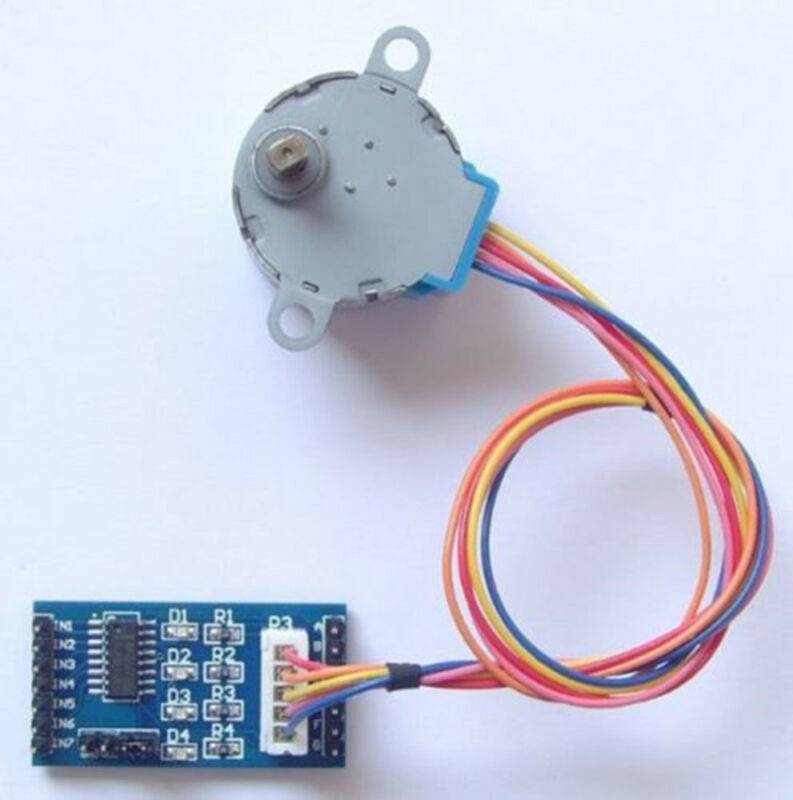
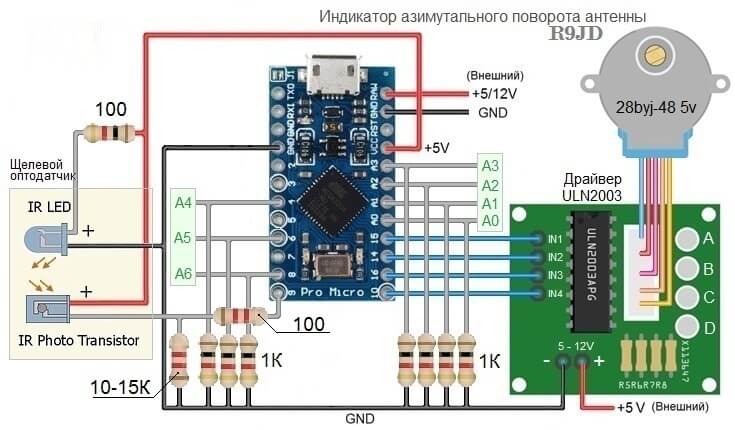
Для подключения шаговых моторов к Arduino нужно использовать драйверы. Очень дешёвые и популярные моторы 28byj-48-5v часто продаются вместе со своим драйвером (транзисторная сборка ULN2003), подключить можно к любым 4-м пинам Ардуино и использовать.
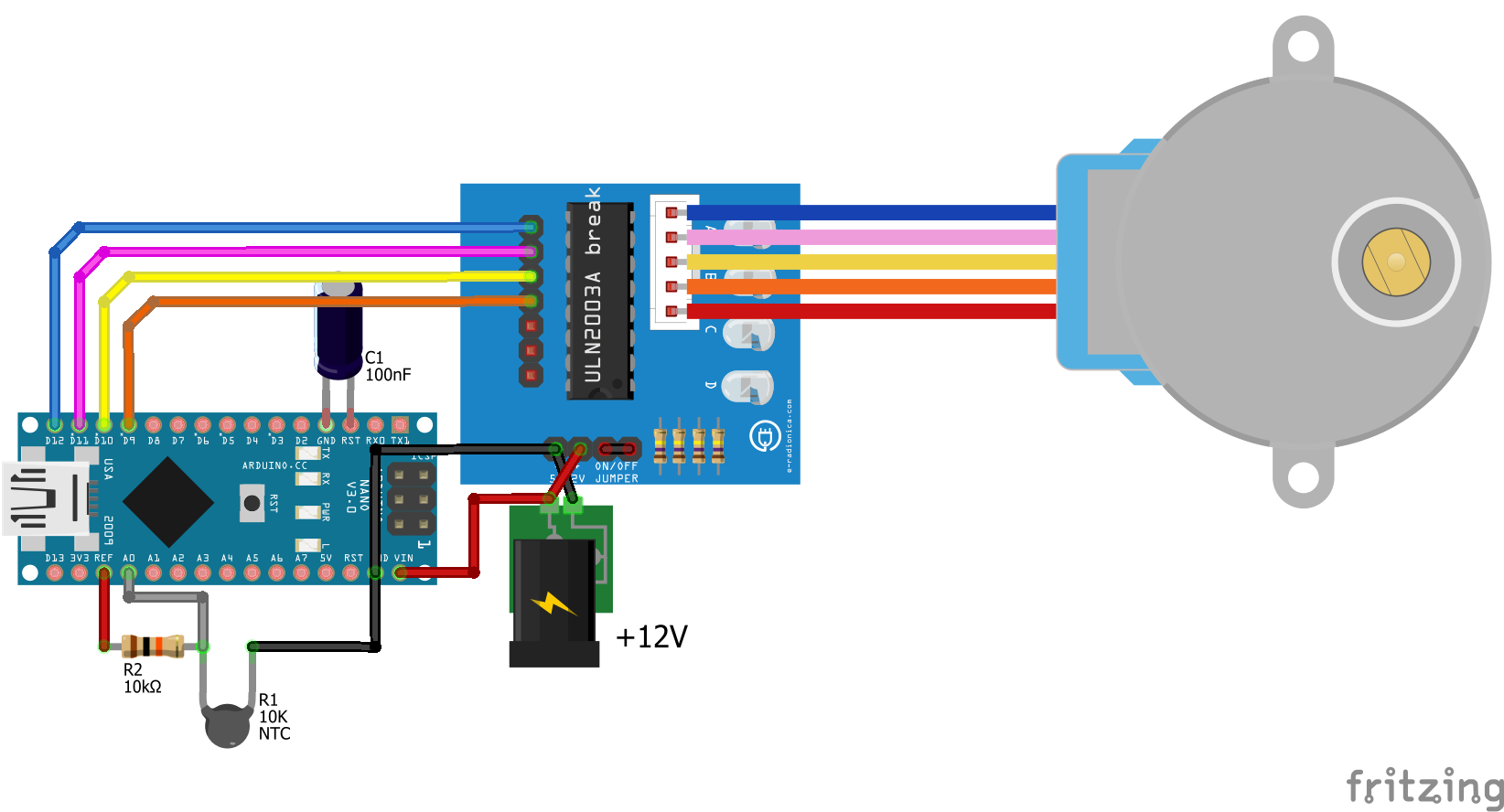
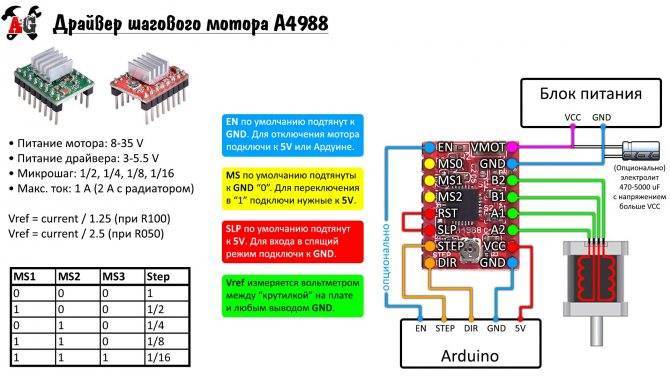
Для работы с большими шаговиками (типа Nema 17) нужно использовать специализированные драйверы, ниже вы найдёте описания и схемы подключения для A4988, DRV8825 и TMC2208, драйверы такого формата подключаются и работают практически одинаково, т.к. разработаны для CNC шилдов и взаимозаменяемы. У этих драйверов нужно настроить ток при помощи крутилки на плате. Это можно сделать “на глаз”, заставив мотор вращаться и регулируя крутилку. Мотор должен вращаться, но не вибрировать как перфоратор и сильно не нагреваться. Лучше настроить ток по опорному напряжению Vref, у каждого драйвера оно считается по своей формуле (см. картинки ниже). Берём ток своего мотора из описания, подставляем в формулу вместо current, считаем, и накручиваем полученное напряжение крутилкой. Для измерения опорного напряжения нужно подключить щупы вольтметра к самой крутилке и пину GND.
Главное преимущество дорогущих драйверов TMC – отсутствие шума/свиста/вибраций при работе, так как драйвер своими силами интерполирует сигнал до микрошага 1/256.
Общие принципы работы шаговых двигателей
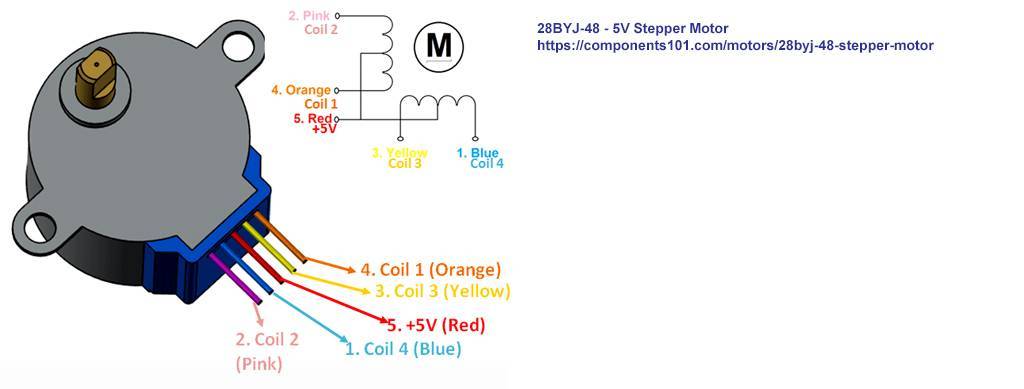
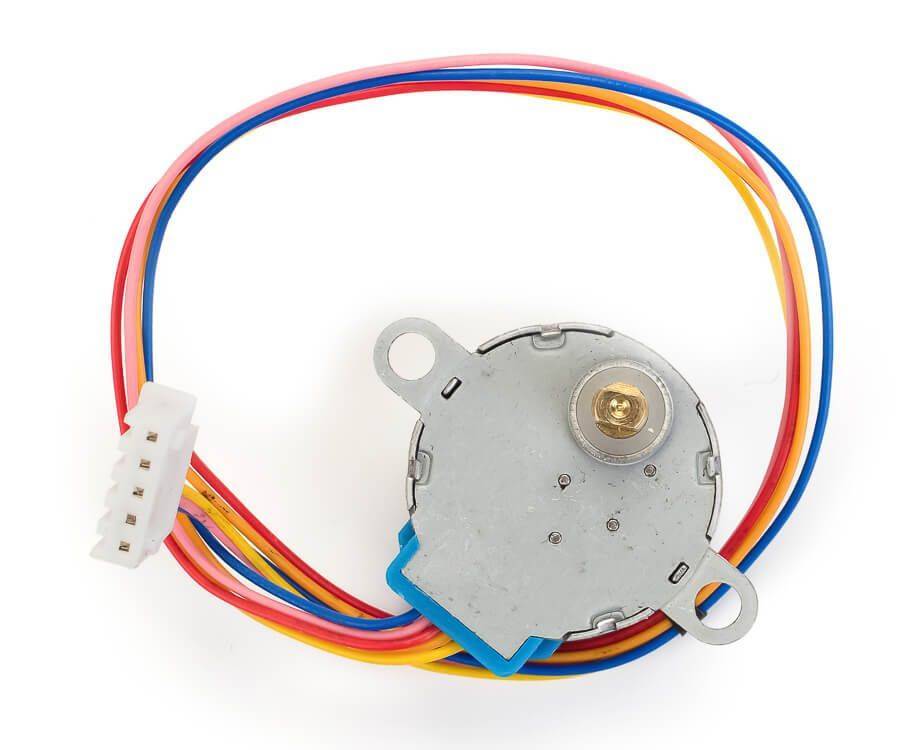
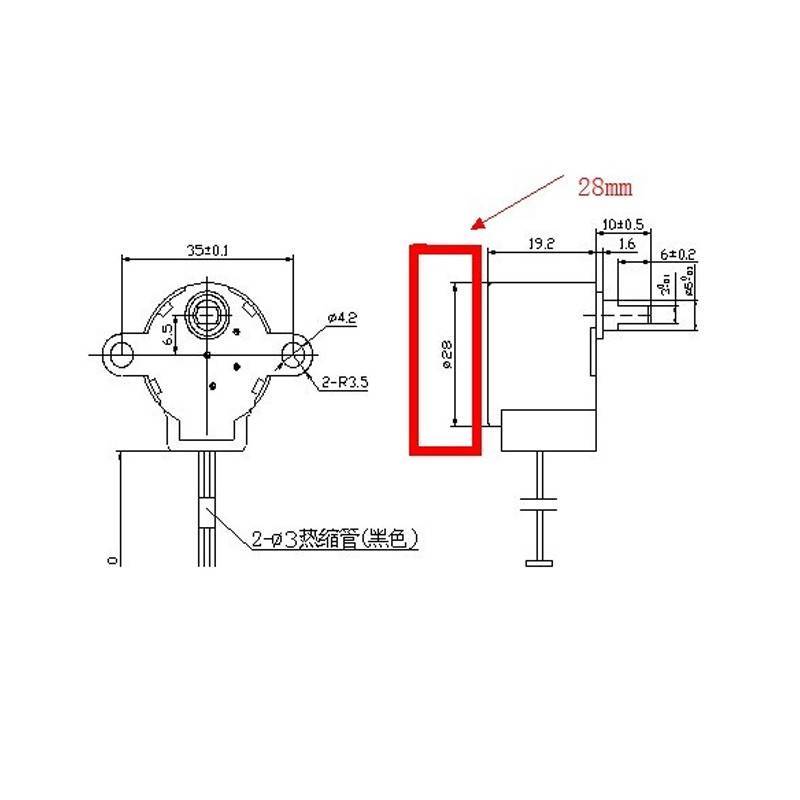
Внешний вид шагового двигателя 28-BYJ48 (купить на AliExpress) представлен на следующем рисунке:

Первый вопрос, который напрашивается при взгляде на этот рисунок – почему в отличие от обычного двигателя из этого шагового двигателя выходят 5 проводов различных цветов? Чтобы понять это давайте сначала разберемся с принципами работы шагового двигателя.
Начнем с того, что шаговые двигатели не вращаются, а “шагают”, поэтому они и называются шаговыми двигателями. То есть в один момент времени они будут передвигаться только на один шаг. Чтобы добиться этого в устройстве шаговых двигателей присутствует несколько катушек и на эти катушки нужно подавать питание в определенной последовательности чтобы двигатель вращался (шагал). При подаче питания на каждую катушку двигатель делает один шаг, при последовательной подаче питания на катушки двигатель будет совершать непрерывные шаги, то есть вращаться. Давайте более подробно рассмотрим катушки, присутствующие внутри шагового двигателя.

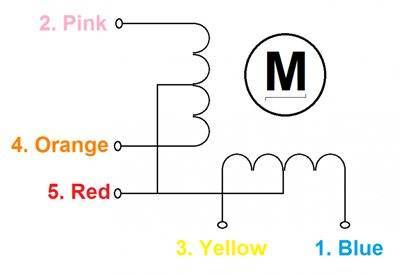
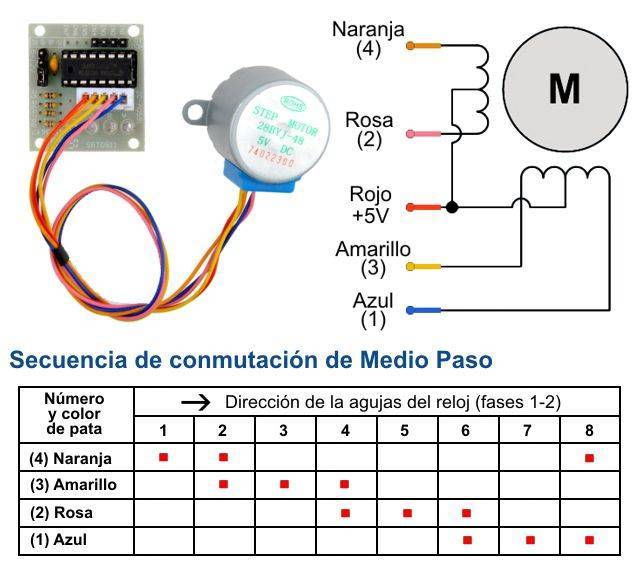
Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Так почему же этот двигатель называется 28-BYJ48? Честно говоря, мы не знаем точного ответа на этот вопрос. Некоторые наиболее важные технические характеристики этого шагового двигателя приведены на следующем рисунке.

На первый взгляд от такого количества характеристик может закружиться голова, но давайте попробуем выделить из них самые важные, те, которые нам понадобятся для дальнейшей работы. Во-первых, мы знаем, что это шаговый двигатель 5V, поэтому необходимо подавать на красный провод 5V. Также мы знаем что это четырехфазный шаговый двигатель поскольку в нем четыре катушки. Передаточное число этого двигателя — 1: 64. Это означает, что вал, который вы видите снаружи, сделает одно полное вращение в том случае, когда двигатель внутри сделает 64 оборота. Это происходит благодаря шестерням, которые включены между двигателем и выходным валом. Эти шестерни помогают в увеличении крутящего момента.
Еще одним важным показателем, который нам следует знать, является угол шага: 5.625°/64. Это значит что когда двигатель сделает последовательность в 8 шагов он будет поворачиваться на 5.625° при каждом шаге и за один полный оборот он сделает 64 шага (5.625*64=360).
Расчет шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов за один оборот для вашего шагового двигателя, потому что только тогда вы можете эффективно его запрограммировать. В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°
Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25)
В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°. Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25).
Справедлива следующая формула:
Количество шагов за оборот = 360 / угол шага.
В нашем случае 360/11.25 = 32 шага за оборот.
Зачем нужен драйвер мотора для управления шаговым двигателем
Большинство шаговых двигателей будут работать только с помощью модуля драйвера мотора. Это связано с тем, что микроконтроллер (в нашем случае плата Arduino) не может обеспечить достаточный ток на своих контактах ввода/вывода для работы двигателя. Поэтому мы будем использовать внешний драйвер мотора для управления нашим шаговым двигателем — модуль ULN2003 (купить на AliExpress). В сети интернет можно найти рейтинги эффективности различных драйверов мотора, но эти рейтинги будут меняться в зависимости от типа используемого шагового двигателя. Основной принцип, которого следует придерживаться при выборе драйвера мотора – он должен обеспечивать достаточный ток для управления шаговым двигателем.
Характеристики микросхемы
Как показывает практика использования представленной микросхемы, она является достаточно мощной, потому что судя по datasheet uln2003ag технические характеристики позволяют коммутировать достаточно большой ток до 500 мА. Но не стоит давать работать ей на пределе, потому что выходной транзистор хоть и защищен обратным диодом, он может пострадать из-за банального перегрева.
Чтобы этого не происходило, правильно подходите к расчету потребляемой и рассеиваемой мощности. В данном случае при максимальном напряжении на CE равном 50 В максимальная мощность выходного транзистора составит не более 25 Вт, при этом он будет очень сильно греться. Поэтому номинальный коммутационный ток лучше поддерживать не более 300-400 мА. В таком режиме микросхема будет работать долго и стабильно.
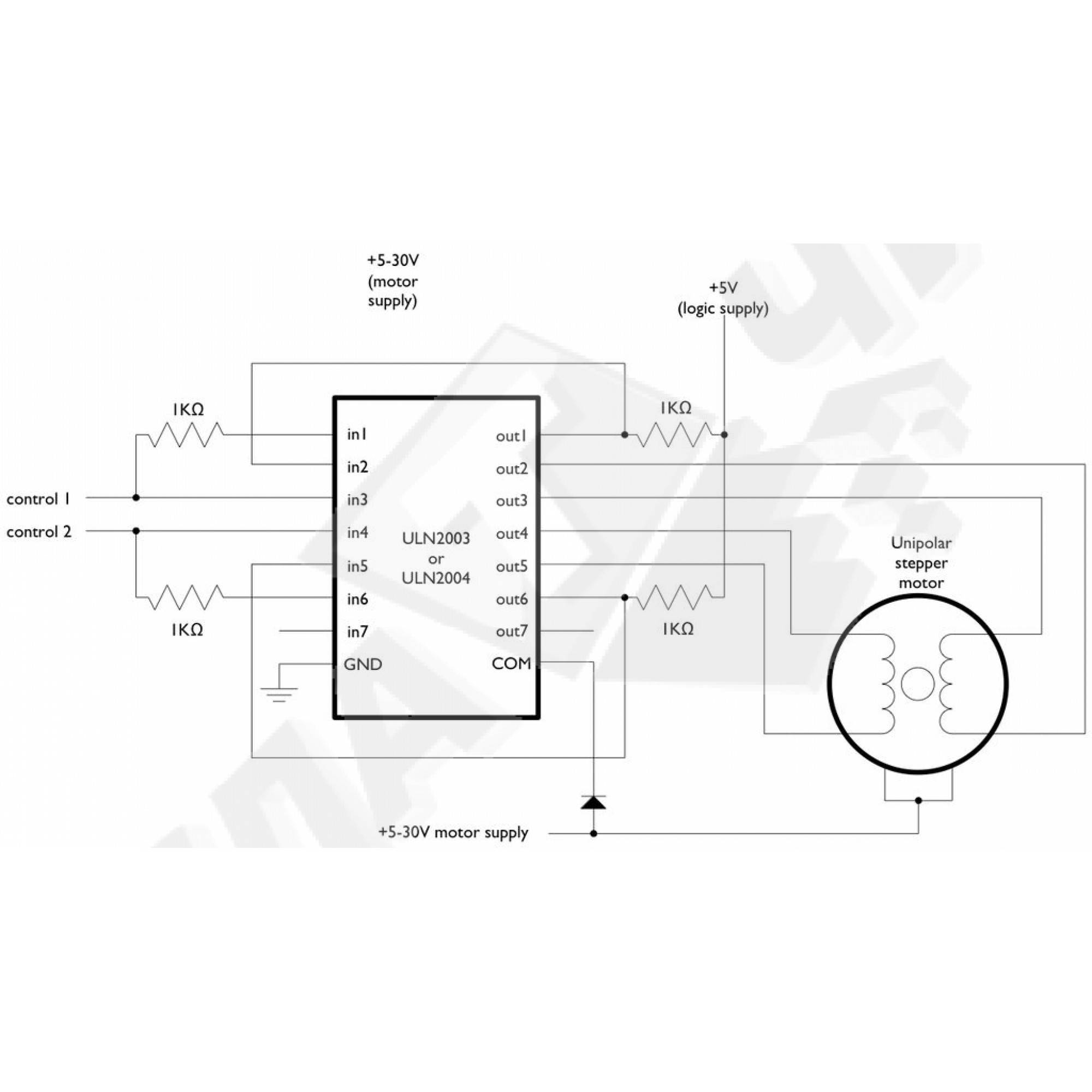
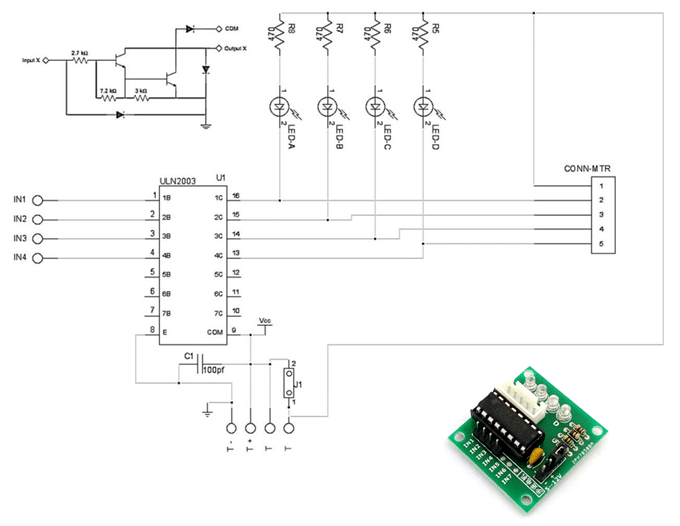
Структурная схема микросхемы до боли проста и состоит всего из 7 ячеек стандартной ТТЛ-логики И-НЕ с подключенным обратным диодом на общий вывод питания COM . С топологией устройства также все просто, каждый вход расположен напротив выхода, что не даст спутать выводы при проектировании каких-либо устройств. Главное запомнить, что первый вывод является прямым входом.
Что касается характеристик, то они представлены для микросхем с ТТЛ-логикой, при котором управляющий сигнал не превышает 5 В. Но также выпускаются аналоги КМОП, которые могут работать от более низкого порога около 2 В до 9 В.
Перейдем к практике
Теория всегда запутанная и непонятная, чтобы понять что и как брать и делать. Поэтому перейдем к практической стороне дела.
Итак, из набора, о котором шла речь ранее, у меня есть:
- Arduino UNO;
- Модуль ULN2003;
- Шаговый двигатель 28BYJ-48 5V DC;
- Связка свитеров, щиток и источник питания для него.
Модуль ULN2003 — предназначен для управления униполярным шаговым двигателем. Схематично это 7-канальный транзисторный комплекс Дарлингтона и, в принципе, им можно управлять чем угодно. Технические характеристики приведены ниже:
- Номинальный ток коллектора ключа — 0,5 А;
- Максимальное выходное напряжение до 50В;
- Защитные диоды на выходах;
- Вход адаптирован к разным типам логики;
- Возможность использования для релейного управления.
Модуль, помимо самой микросхемы ULN2003, имеет светодиоды для индикации выходного напряжения, колодку подключения и перемычку для отключения питания.
Двигатель 28BYJ-48 5V DC подключается штатным разъемом к белому блоку на плате. В нем 5 проводов: общий красный и 4 от обмоток.
- 32 шага на оборот ротора;
- Интегрированная коробка передач с передаточным отношением 63,68395: 1, благодаря которой вал совершает 1 оборот за 2048 шагов в режиме полного шага и 4096 шагов в режиме полушага;
- Скорость вращения: номинальная 15 об / мин, максимальная 25 об / мин;
- Напряжение питания 5 В;
- Ток одной обмотки 160 мА;
- Полный ток: в 4-фазном режиме 320 мА, при быстром вращении 200 мА.
- Передаточное число: 1 / 63,68395
- Угол наклона ротора (без редуктора): при 4-ступенчатой последовательности управляющих сигналов 11,25 ° (32 ступени на оборот); в 8 шагов — 5,625 ° (64 шага на оборот)
- Крутящий момент не ниже: 34,3 мНм (120 Гц);
- Тормозной момент: 600-1200 гсм;
- Тяга: 300 г / м 2;
- Вес: 33 гр.
Итак, давайте рассмотрим более простые примеры управления двигателем без использования библиотек. Как известно, на обмотки необходимо подавать импульсы определенной последовательности.
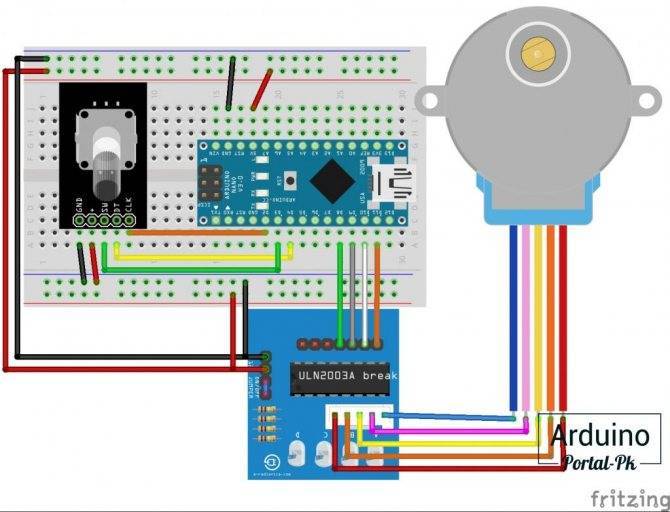
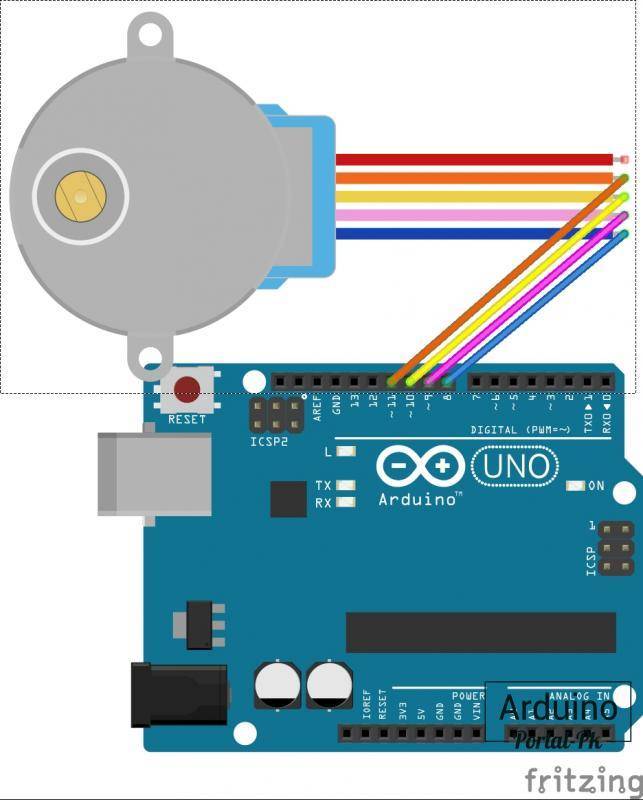
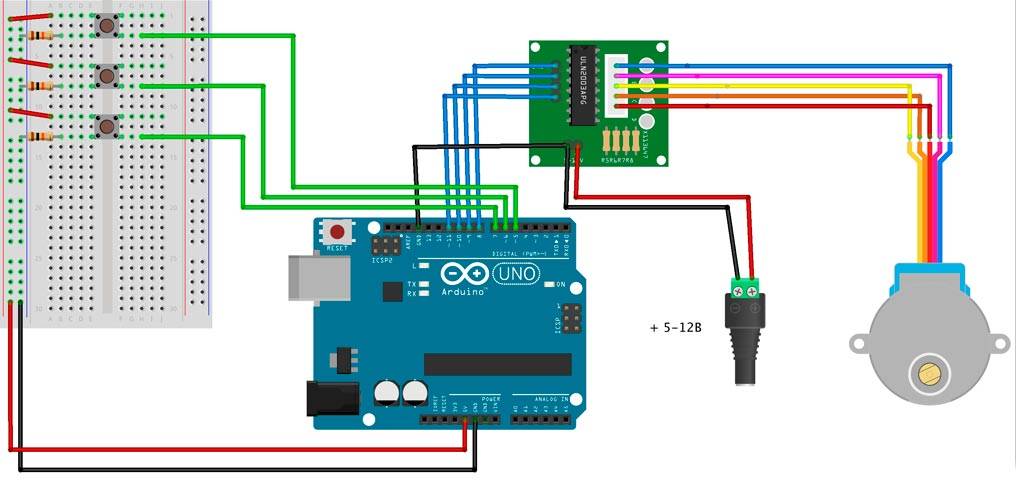
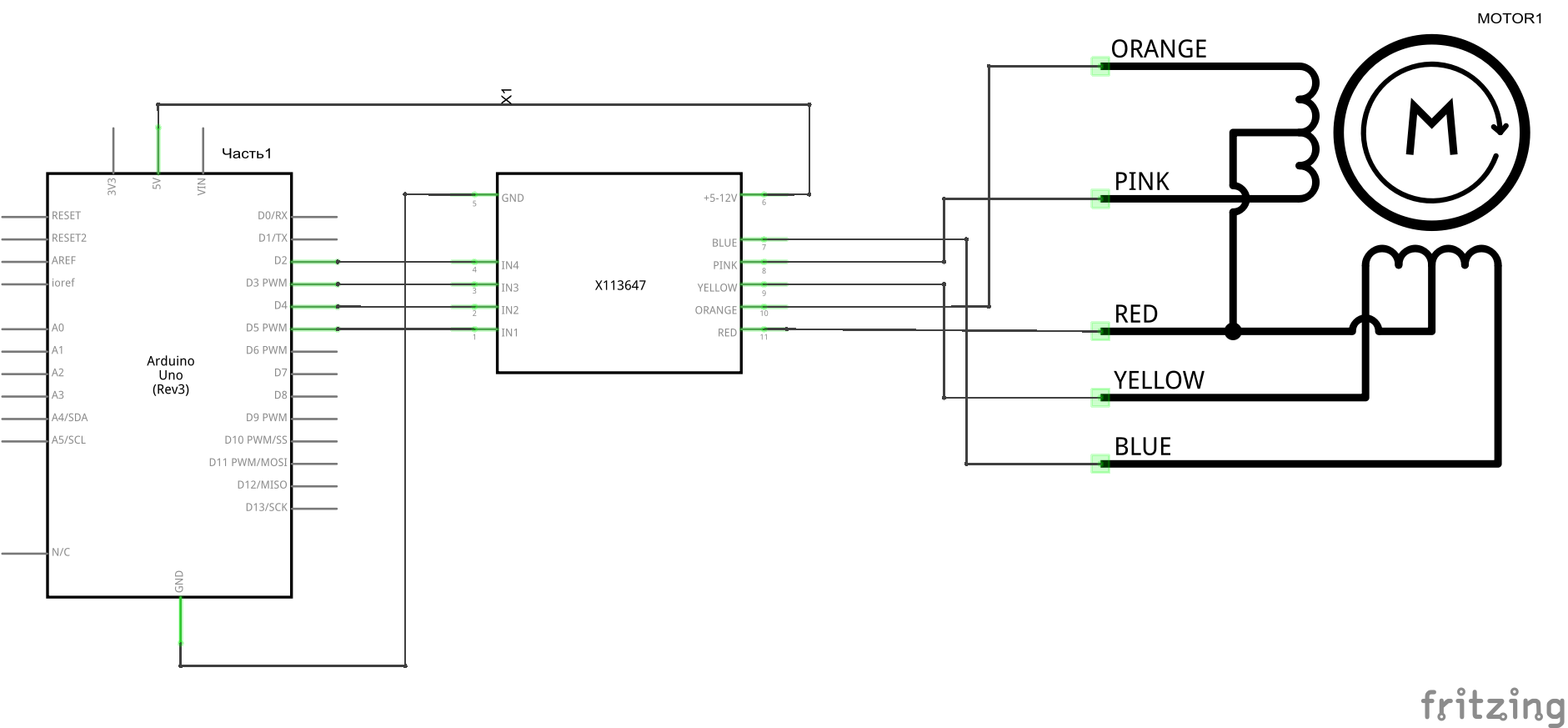
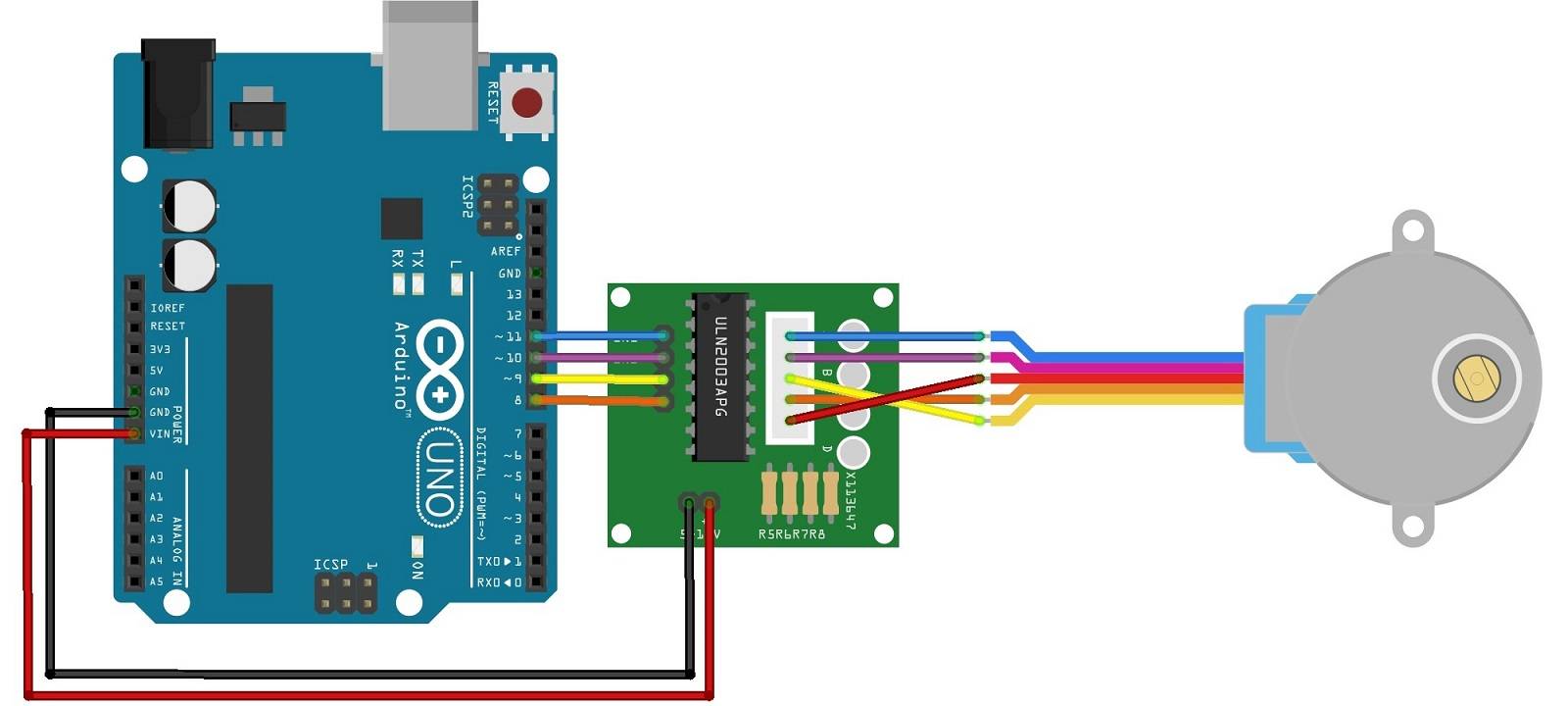
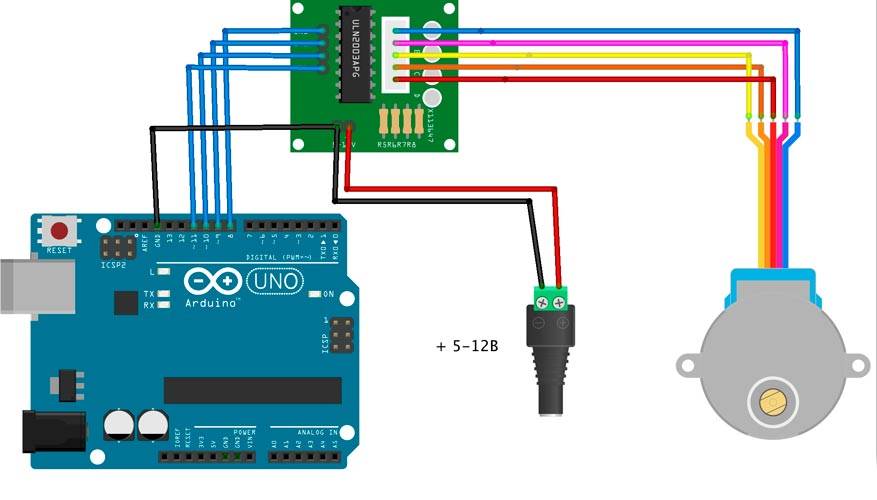
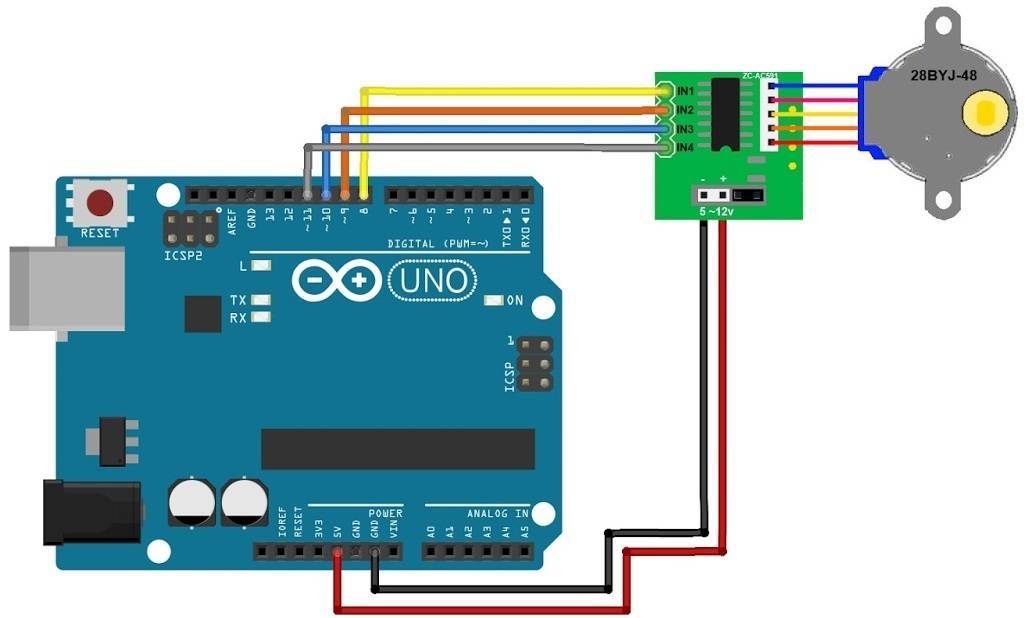
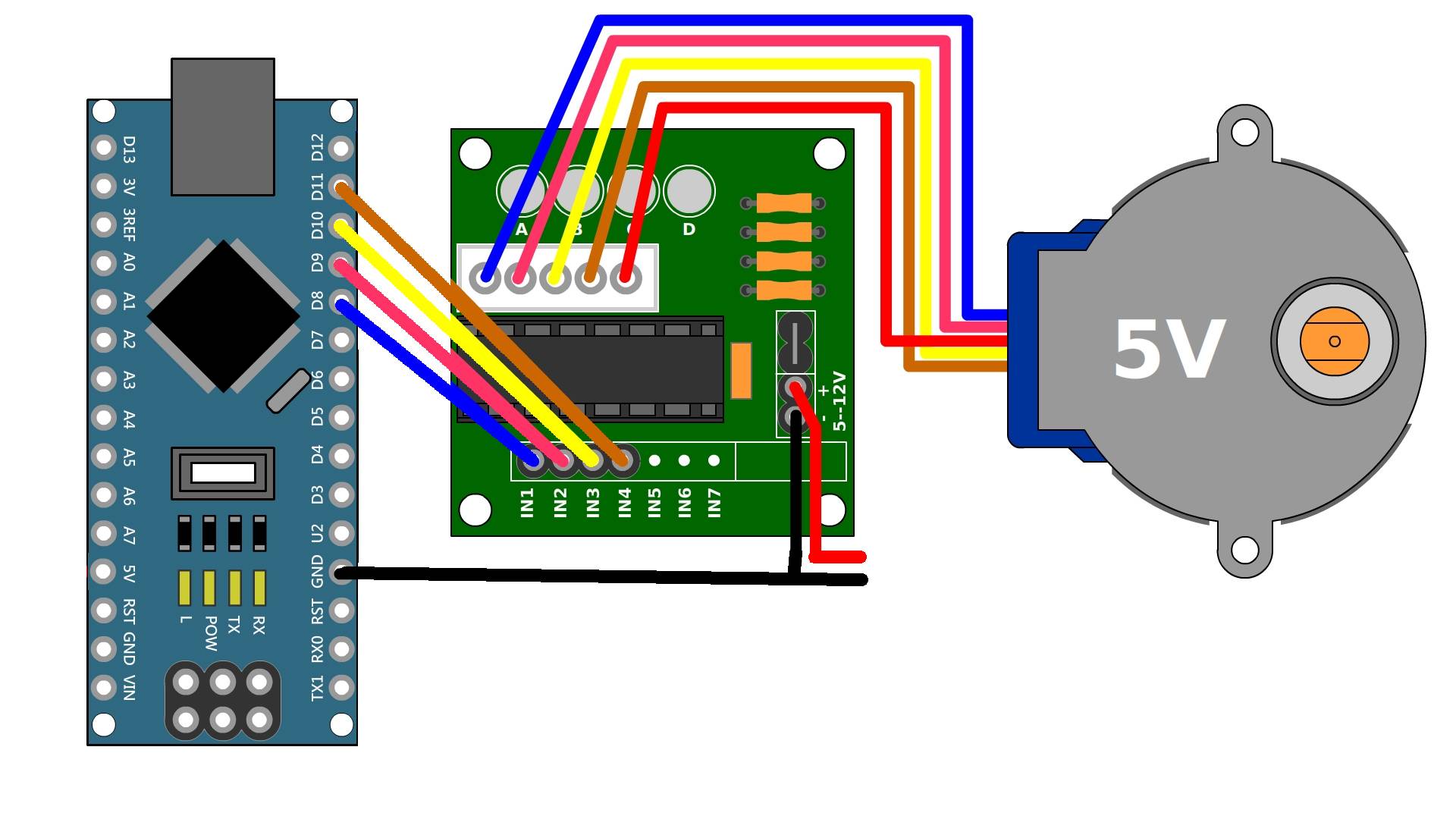
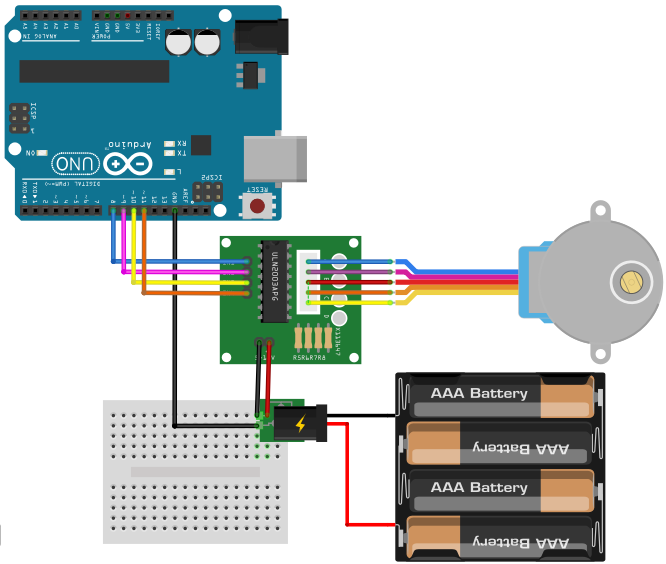
Итак, попробуем выдать такие сигналы от ардуино. Для этого я подключаю модуль ULN2003 по следующей схеме (вывод arduino — контакт модуля)
Двигатель начнет вращаться, скорость вращения фиксируется переменной dl. Я только ввел его, чтобы не вводить вручную задержку на каждом шаге. Ниже я приложу видео и в нем для наглядности я показал как вращение с задержкой между шагами равной 2 мс (за 1 мс мотор только пищит и не вращается…), и с задержкой полсекунды, что позволяет четко видеть, в какой последовательности отправляются сигналы на обмотки, что позволяет убедиться, что напряжение приложено к двум обмоткам одновременно, согласно приведенной выше таблице. С задержкой в 2 мс светодиоды загораются как будто все вместе.
Перейдем к полушаговому управлению. В следующей таблице показана процедура подачи сигналов на обмотки рассматриваемого двигателя для ее реализации.
Первое, что бросается в глаза, это то, что код занимает намного меньше времени, количество шагов для полного оборота ротора задается первым аргументом функции Stepper, с его помощью выводов, к которым подключен двигатель и объявляется количество шагов в полном повороте дерева, его синтаксис следующий:
Имя шагового двигателя (количество шагов за полный оборот, вывод 1, вывод 2, вывод 3, вывод 4).
Что ж, когда нам нужно повернуть сам мотор, мы обращаемся к мотору, имя которого мы написали в Stepper с префиксом «.step», у нас есть myStepper.step. В видеоролик я для наглядности вставил фрагмент, в котором двигатель крутится на пол-оборота по часовой стрелке, а на полный — против. Это в самом конце. Я изменил код для этого следующим образом:
В дверном мониторе микроконтроллер «сообщает» нам, в каком направлении вращается двигатель.
И напоследок предлагаю посмотреть видео, демонстрирующее, как работают все примеры кода в этой статье
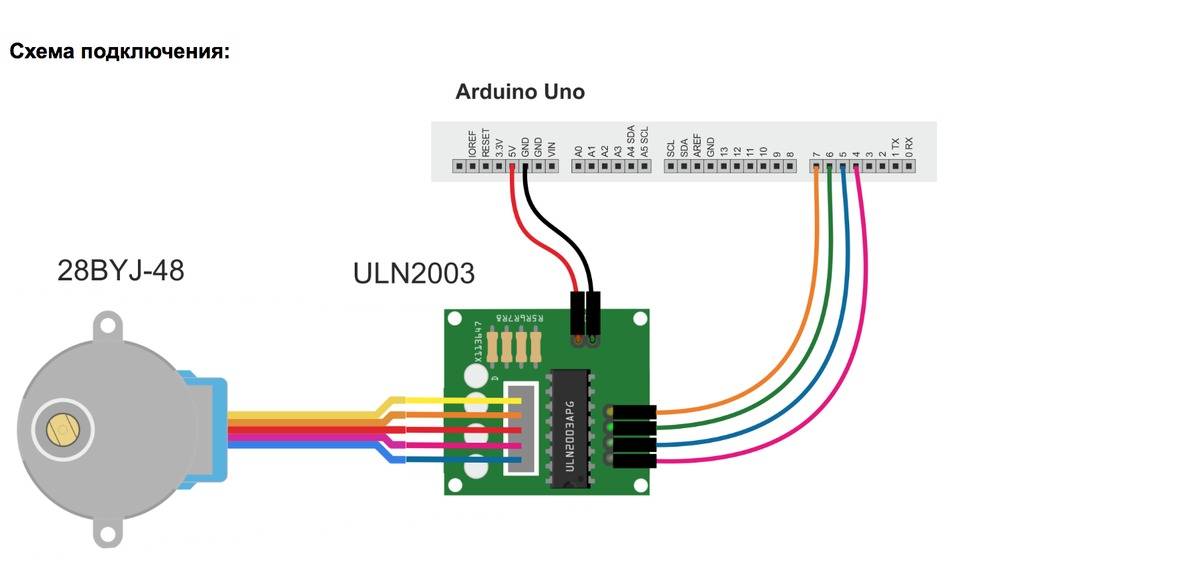
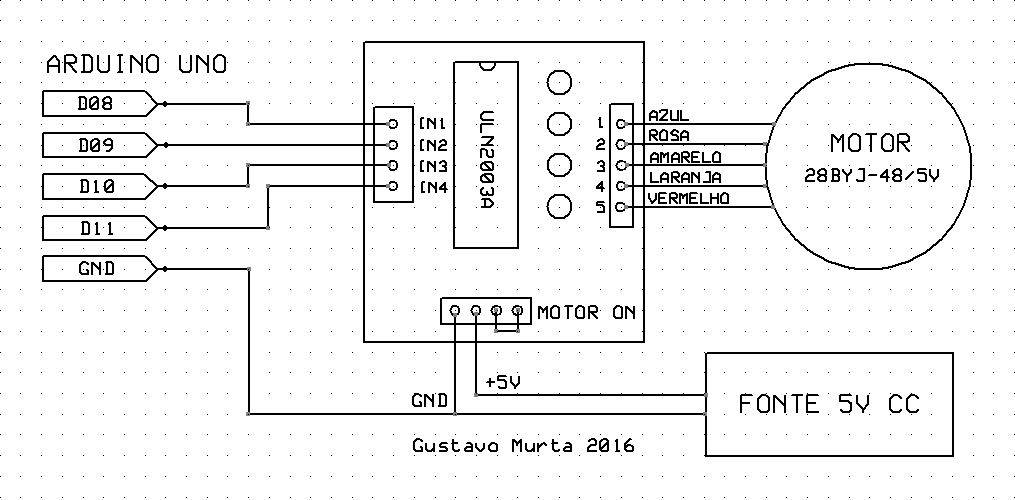
Схема подключения
На uln 2003 схема подключения до боли проста и не включает никаких компонентов. Главное, не перепутать вход с выходом и общий вывод, в остальном все и так ясно. Но все же для наглядности стоит повторить схему на примере с шаговым двигателем с питанием от 12 до 24 В. Общий провод от +24В подключается на 9 вывод и к центральному отводу обмоток двигателя, все остальные оп порядку согласно полюсам. Управление двигателем осуществляется по аналогичным линиям, только со входа МС.
При работе в таком режиме вероятность спалить выходной транзистор достаточно большая, потому что короткое замыкание в двигателе никто еще не отменял, точно также, как и клин ротора, из-за чего ток может существенно возрасти. Поэтому в каждую линию управления по выходу можно поставить шунт и обрисовать его схемой защиты от КЗ. Это зависит от конкретной задачи и типа устройства, в котором эта микросхема применяется.
Управление шаговым двигателем на Ардуино
Рассмотрим управление шаговым мотором при помощи стандартной библиотеки stepper.h и с помощью более удобной и популярной библиотеки accelstepper.h, где реализовано намного больше дополнительных команд и функций. Схема подключения мотора при этом остается неизменной. Чуть дальше мы перечислили возможные команды, которые можно использовать в программе с этими библиотеками.
Скетч для шагового двигателя на Ардуино (Stepper.h)
#include <Stepper.h> // библиотека для шагового двигателя // количество шагов на 1 оборот, измените значение для вашего мотора const int stepsPerRevolution = 200; // устанавливаем порты для подключения драйвера Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); void setup() { myStepper.setSpeed(60); // устанавливаем скорость 60 об/мин } void loop() { // поворачиваем ротор по часовой стрелке myStepper.step(stepsPerRevolution); delay(500); // поворачиваем ротор против часовой стрелки myStepper.step(-stepsPerRevolution); delay(500); }
Пояснения к коду:
- вместо портов 8,9,10,11 можно использовать любые цифровые порты;
- библиотека Stepper.h имеет маленький функционал, поэтому подходит только для тестирования шагового двигателя и проверки подключения драйвера.
Скетч для шагового мотора с библиотекой AccelStepper.h
#include // библиотека для шагового двигателя
Пояснения к коду:
- библиотеку AccelStepper.h можно использовать при подключении шагового двигателя к Motor Shield L293D совместно с библиотекой AFMotor.h;
- в программе можно задавать не только максимальную скорость, но и ускорение и замедление вала шагового двигателя.
Описание команд библиотеки AccelStepper.h
AccelStepper mystepper(DRIVER, step, direction);// Шаговый двигатель, управляемый платой AccelStepper mystepper(FULL2WIRE, pinA, pinB);// Шаговый двигатель, управляемый Н-мостом AccelStepper mystepper(FULL4WIRE, pinA1, pinA2, pinB1, pinB2);// Униполярный двигатель mystepper.setMaxSpeed(stepsPerSecond);// Установка скорости оборотов в минуту mystepper.setSpeed(stepsPerSecond);// Установка скорости в шагах за секунду mystepper.setAcceleration(stepsPerSecondSquared);// Установка ускорения
mystepper.currentPosition(); // Возвращает текущее положение в шагах mystepper.setCurrentPosition (long position); Обнуляет текущую позицию до нуля mystepper.targetPosition(); // Конечное положение в шагах mystepper.distanceToGo(); // Вернуть расстояние до указанного положения mystepper.moveTo(long absolute); // Переместиться в абсолютно указанное положение mystepper.move(long relative); // Переместиться в относительно указанное положение
mystepper.run(); // Начать движение с ускорением, функцию следует вызывать повторно mystepper.runToPosition(); // Начать движение до указанной точки mystepper.runToNewPosition(); // Начать движение с ускорением до заданной позиции mystepper.stop(); // Максимально быстрая остановка (без замедления) mystepper.runSpeed(); // Начать движение с заданной скоростью без плавного ускорения mystepper.runSpeedToPosition(); // Начать движение без плавного ускорения, до позиции
mystepper.disableOutputs(); // Деактивирует зарезервированные пины и устанавивает их в режим LOW. Снимает напряжение с обмоток двигателя, экономя энергию mystepper.enableOutputs(); // Активирует зарезервированные пины и устанавивает их в режим OUTPUT. Вызывается автоматически при запуске двигателя
Управление ULN2003
Входная часть сборок ULN2003A, ULN2003AI, ULQ2003A спроектирована так чтобы работать совместно с ТТЛ и 3,3 В и 5 В К-МОП логикой.
ULN2002A создана для p-МОП логики. Во входных цепях ULN2002A добавлен стабилитрон на 7 В и увеличено сопротивление базового резистора до 10,5 кОм, благодаря этому сборка может работать с входными напряжениями от 14 до 25 В.
Сборка ULN2004A, ULQ2004A предназначена для К-МОП логики с уровнем напряжений от 6 до 15В. По сравнению с ULN2003, у ULN2004 просто увеличено сопротивление базового резистора до 10,5 кОм.
Как можно видеть на структурной схеме, входы и выходы расположены напротив друг друга, что весьма удобно при разводке печатной платы.
ULN2003 выпускается как для объемного монтажа: PDIP, так и для поверхностного: SOIC, SOP и TSSOP.
Второй вариант.
Второй вариант отличается тем, что после нажатия и отпускания кнопки, шаговый двигатель продолжает вращаться на определенное количество шагов. Так же этот вариант дополнен возможностью подключения концевеков (концевеки использовать не обязательно).
Ниже представлен скетч второго варианта, он имеет уже 8 настроек.
Две настройки как и в первом варианте это t1 и t2, которые являются задержкой между переключениями фаз.
Две настройки х1, х2 которые отвечают за количество шагов которые предстоит выполнить при одном нажатии кнопки.
И 4 настройки, это переменная i которая имеет значение 50 . Эта переменная отвечает за количество шагов, которые необходимо выполнить при срабатывании концевека. То есть при срабатывании концевека, шаговый двигатель останавливается и выполняет обратное вращение чтобы отъехать от концевека на количество шагов, которое прописано в переменной i.
Можете загрузить скетч как есть, или при желании предварительно подредактировать настройки.
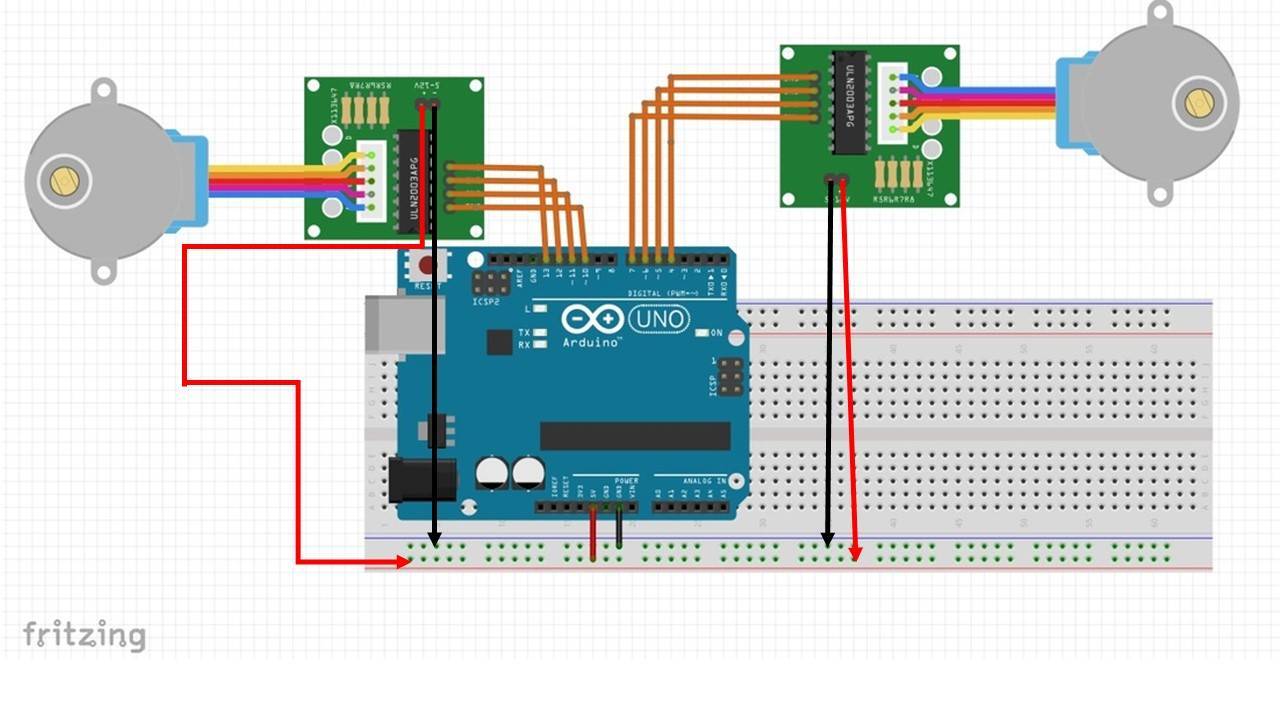
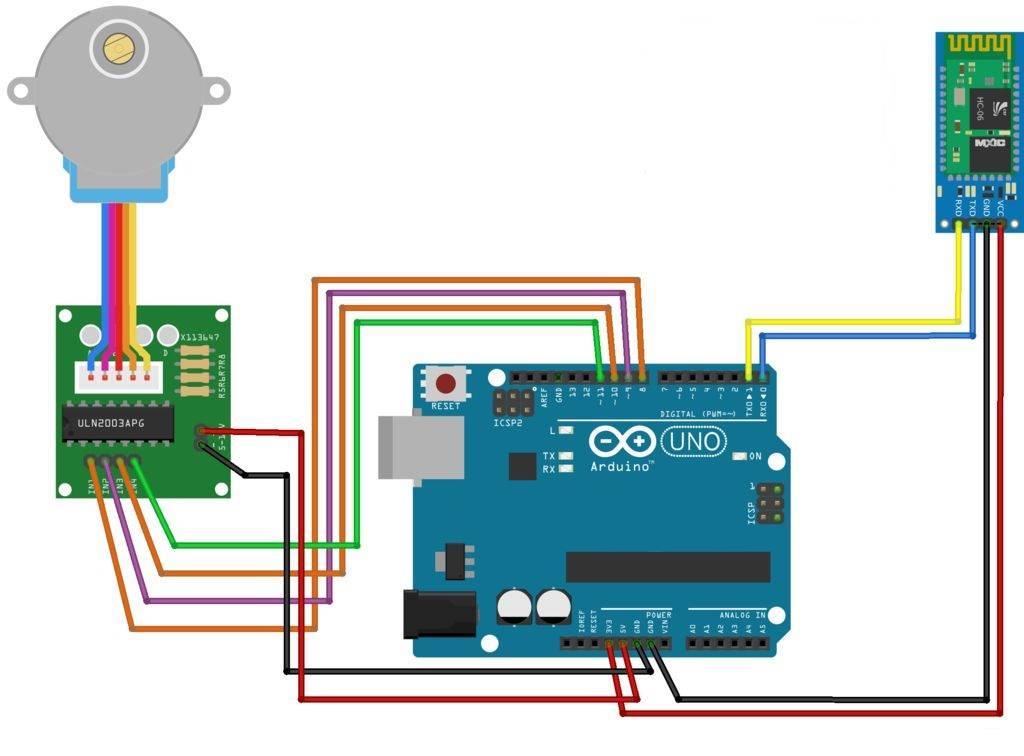
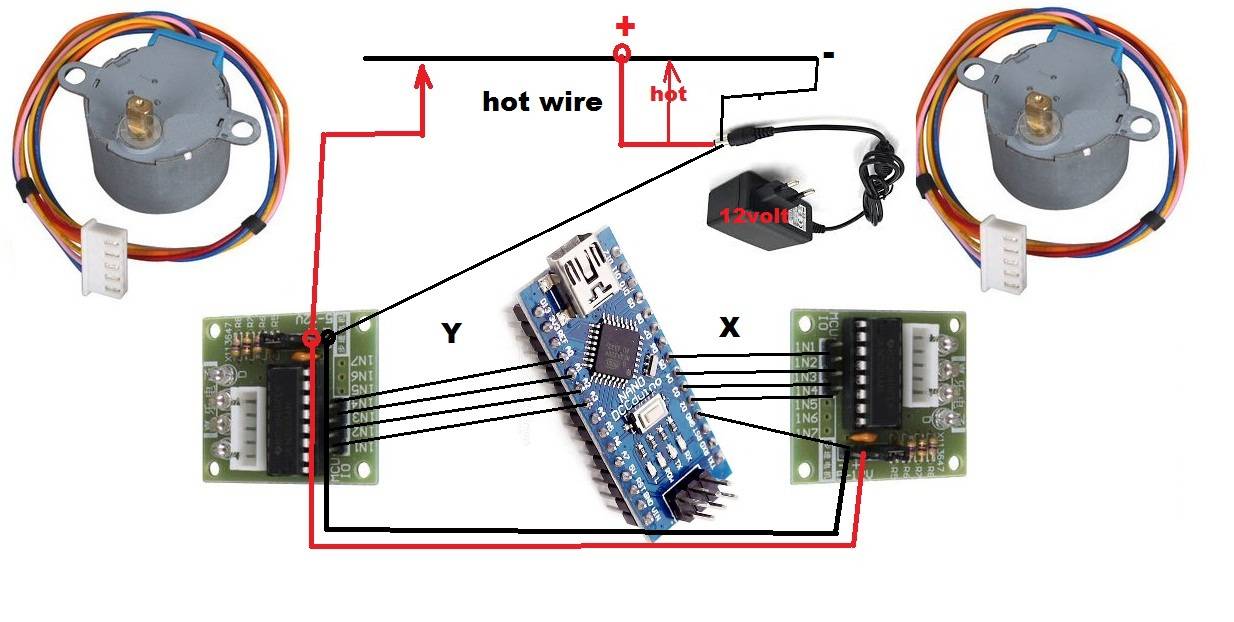
После чего можно приступать к сборке устройства согласно схемы представленной ниже.
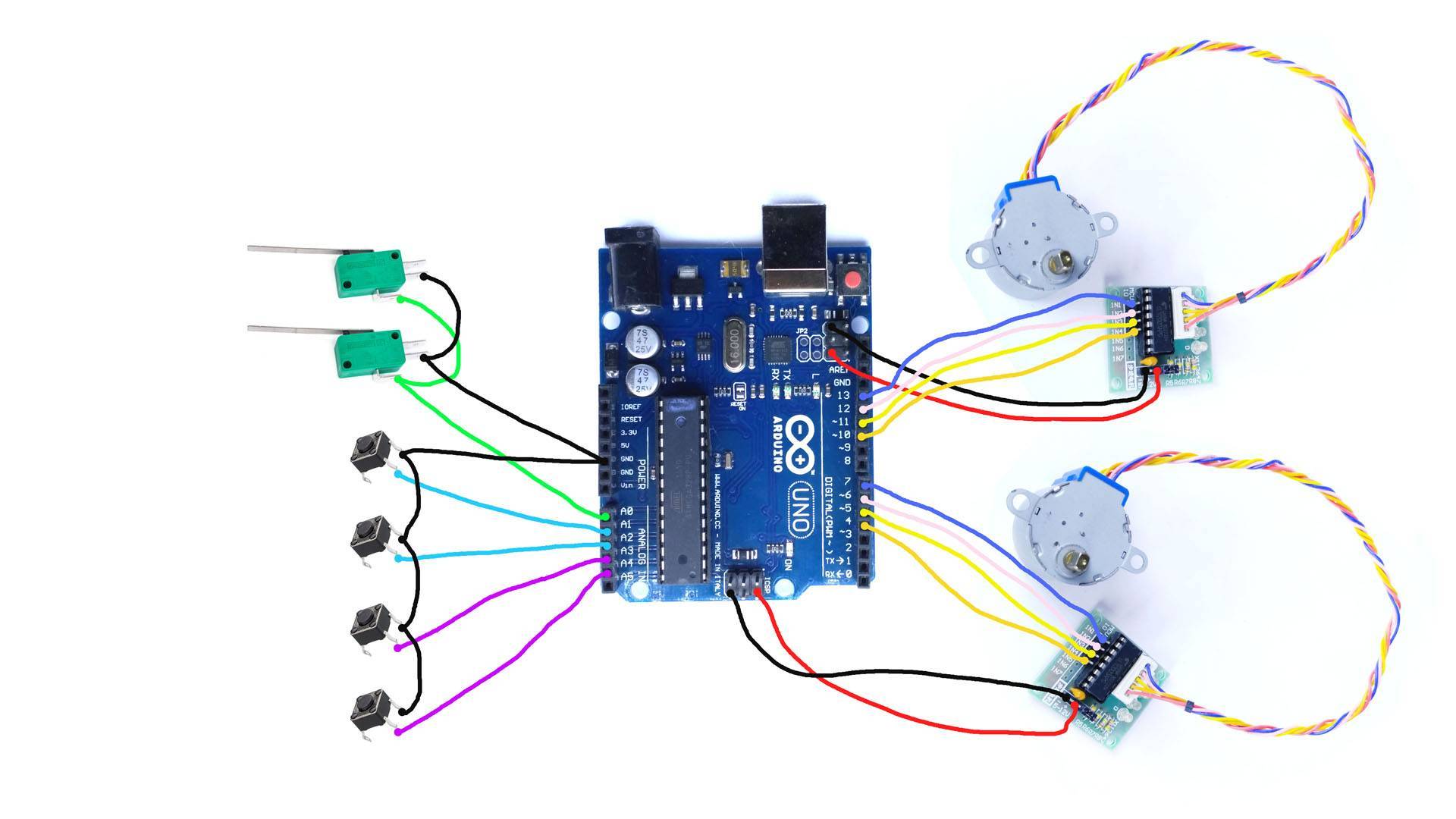
Как видите концевеки подключаются параллельно, это означает что всего на 2 контакта можно подключать любое количество концевеков. И при срабатывании любого из них, вал двигателя отъедет в обратном направлении, не зависимо от того какой из двигателей работал и в каком направлении вращался вал.
Если все собрано, то можете подключить питание и протестировать устройство.
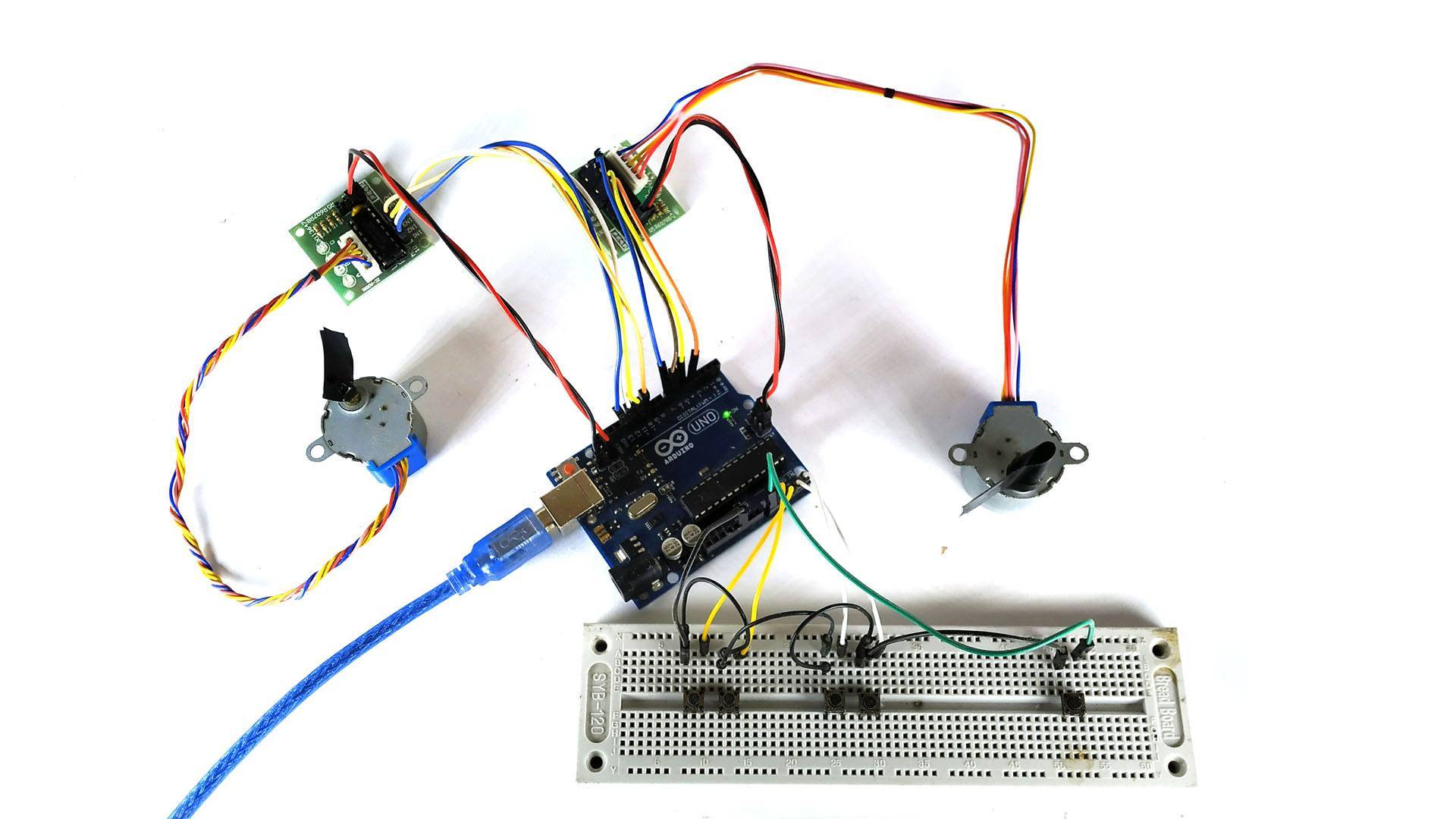
Так как у меня не нашлось свободного концевека, то вместо него пришлось применить еще одну кнопку!
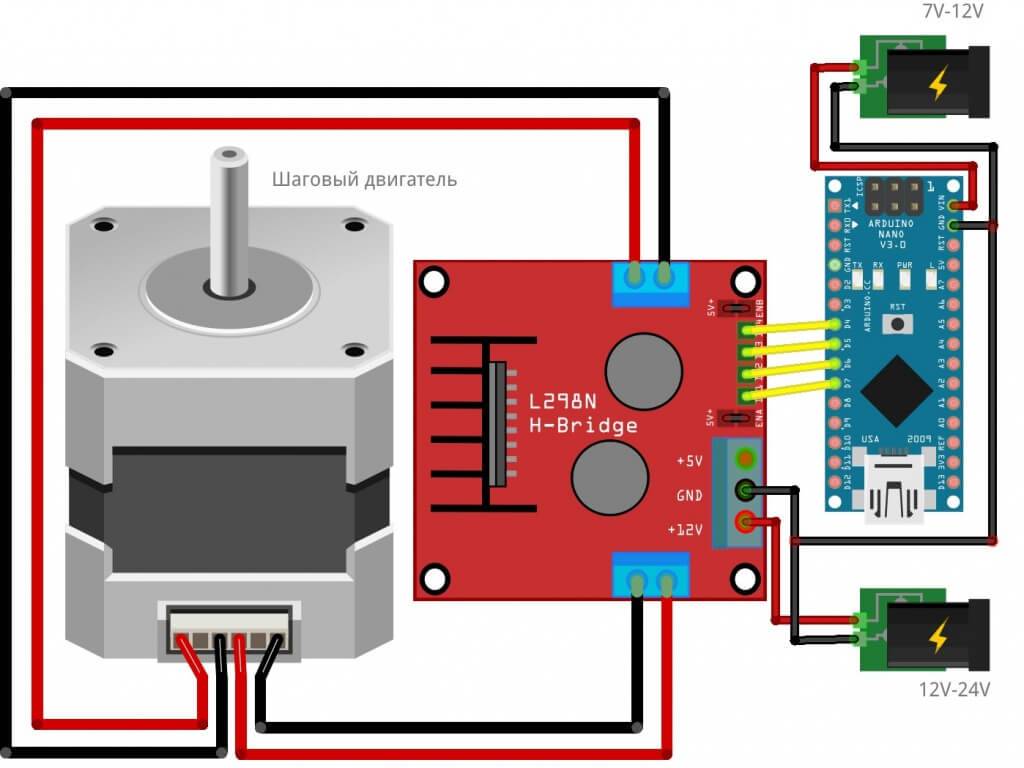
L298N, Arduino и двигатель постоянного тока
Данный модуль дает возможность управлять одним или двумя двигателями постоянного тока. Для начала, подключите двигатели к пинам A и B на контроллере L298N.
Если вы используете в проекте несколько двигателей, убедитесь, что у них выдержана одинаковая полярность при подключении. Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Поверьте, с точки зрения программирования Arduino это неудобно.
После этого подключите источник питания. Плюс – к четвертому пину на L298N, минус (GND) – к 5 пину. Если ваш источник питания до 12 вольт, коннектор, отмеченный 3 на рисунке выше, можно оставить. При этом будет возможность использовать 5 вольтовый пин 6 с модуля.
Данный пин можно использовать для питания Arduino. При этом не забудьте подключить пин GND с микроконтроллера к 5 пину на L298N для замыкания цепи. Теперь вам понадобится 6 цифровых пинов на Arduino. Причем некоторые пины должны поддерживать ШИМ-модуляцию.
ШИМ-пины обозначены знаком “~” рядом с порядковым номером.
Теперь подключите цифровые пины Arduino к драйверу. В нашем примере два двигателя постоянного тока, так что цифровые пины D9, D8, D7 и D6 будут подключены к пинам IN1, IN2, IN3 и IN4 соответственно. После этого подключите пин D10 к пину 7 на L298N (предварительно убрав коннектор) и D5 к пину 12 (опять таки, убрав коннектор).
Направление вращения ротора двигателя управляется сигналами HIGH или LOW на каждый привод (или канал). Например, для первого мотора, HIGH на IN1 и LOW на IN2 обеспечит вращение в одном направлении, а LOW и HIGH заставит вращаться в противоположную сторону.
При этом двигатели не будут вращаться, пока не будет сигнала HIGH на пине 7 для первого двигателя или на 12 пине для второго. Остановить их вращение можно подачей сигнала LOW на те же указанные выше пины. Для управления скоростью вращения используется ШИМ-сигнал.
Скетч приведенный ниже, отрабатывает в соответствии со схемой подключения, которую мы рассматривали выше. Двигатели постоянного тока и Arduino питаются от внешнего источника питания.
// подключите пины контроллера к цифровым пинам Arduino
// первый двигатель
int enA = 10;
int in1 = 9;
int in2 = 8;
// второй двигатель
int enB = 5;
int in3 = 7;
int in4 = 6;
void setup()
{
// инициализируем все пины для управления двигателями как outputs
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void demoOne()
{
// эта функция обеспечит вращение двигателей в двух направлениях на установленной скорости
// запуск двигателя A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// устанавливаем скорость 200 из доступного диапазона 0~255
analogWrite(enA, 200);
// запуск двигателя B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// устанавливаем скорость 200 из доступного диапазона 0~255
analogWrite(enB, 200);
delay(2000);
// меняем направление вращения двигателей
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
delay(2000);
// выключаем двигатели
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void demoTwo()
{
// эта функция обеспечивает работу двигателей во всем диапазоне возможных скоростей
// обратите внимание, что максимальная скорость определяется самим двигателем и напряжением питания
// ШИМ-значения генерируются функцией analogWrite()
// и зависят от вашей платы управления
// запускают двигатели
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// ускорение от нуля до максимального значения
for (int i = 0; i < 256; i++)
{
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// торможение от максимального значения к минимальному
for (int i = 255; i >= 0; –i)
{
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// теперь отключаем моторы
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void loop()
{
demoOne();
delay(1000);
demoTwo();
delay(1000);
}